

Mechanical hand control system for flexible film transferring
A control system and manipulator technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of lack of control means, need for further improvement, and the inability to adapt the pick-up head to achieve improved accuracy, compact structure, and accurate pick-up and positioning operations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
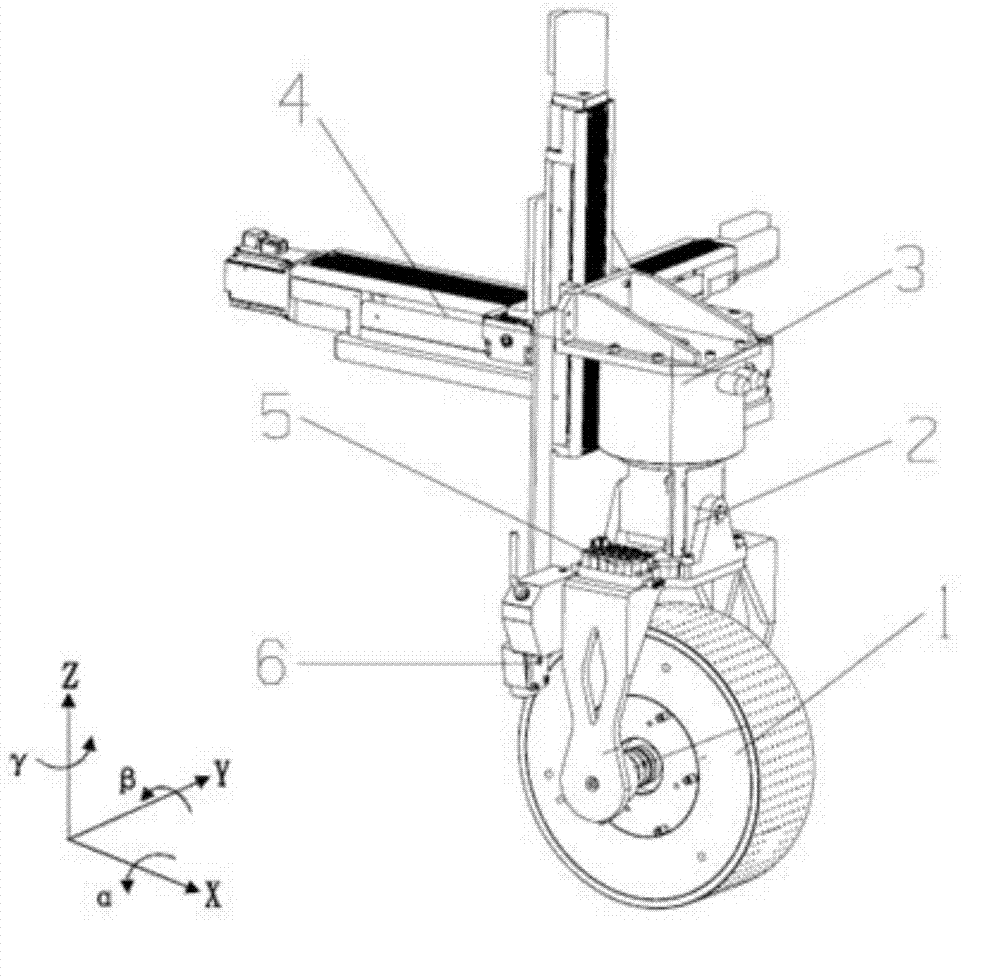
[0039] figure 1 It is a schematic diagram of the main structure of the multi-degree-of-freedom manipulator constructed according to the preferred embodiment of the present invention. Such as figure 1 As shown in , the multi-degree-of-freedom manipulator mainly includes a pick-up head 1, an α-rotation module 2, a γ-rotation module 3, an XYZ three-axis translation module 4, and an air distributi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More