

Target posture tracking method based on inertia and geomagnetic sensor
A geomagnetic sensor and target attitude technology, applied in the direction of instruments, ground navigation, measuring devices, etc., can solve the problems that the influence of linear acceleration cannot be solved, and the three-degree-of-freedom attitude information acceleration sensor cannot be obtained, so as to eliminate drift errors and the method is simple Ease of operation and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below with reference to the accompanying drawings and examples.
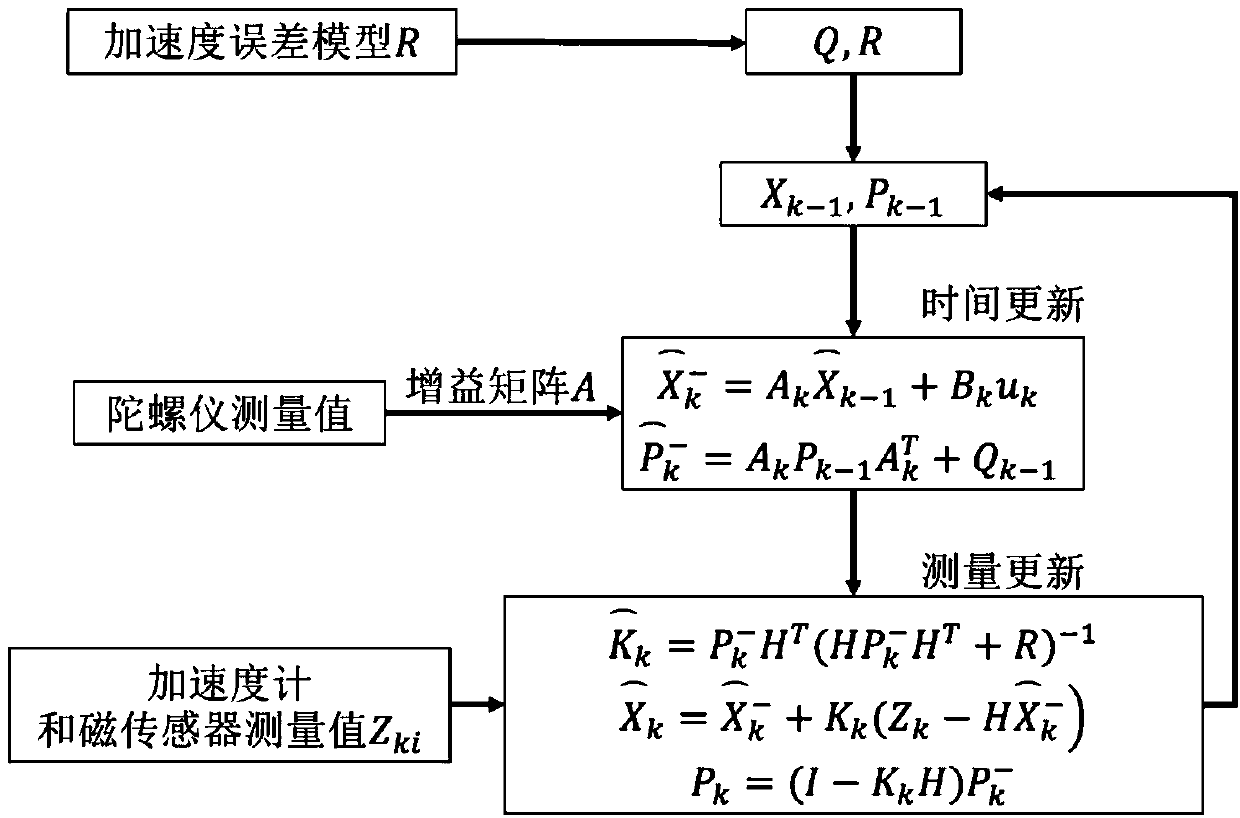
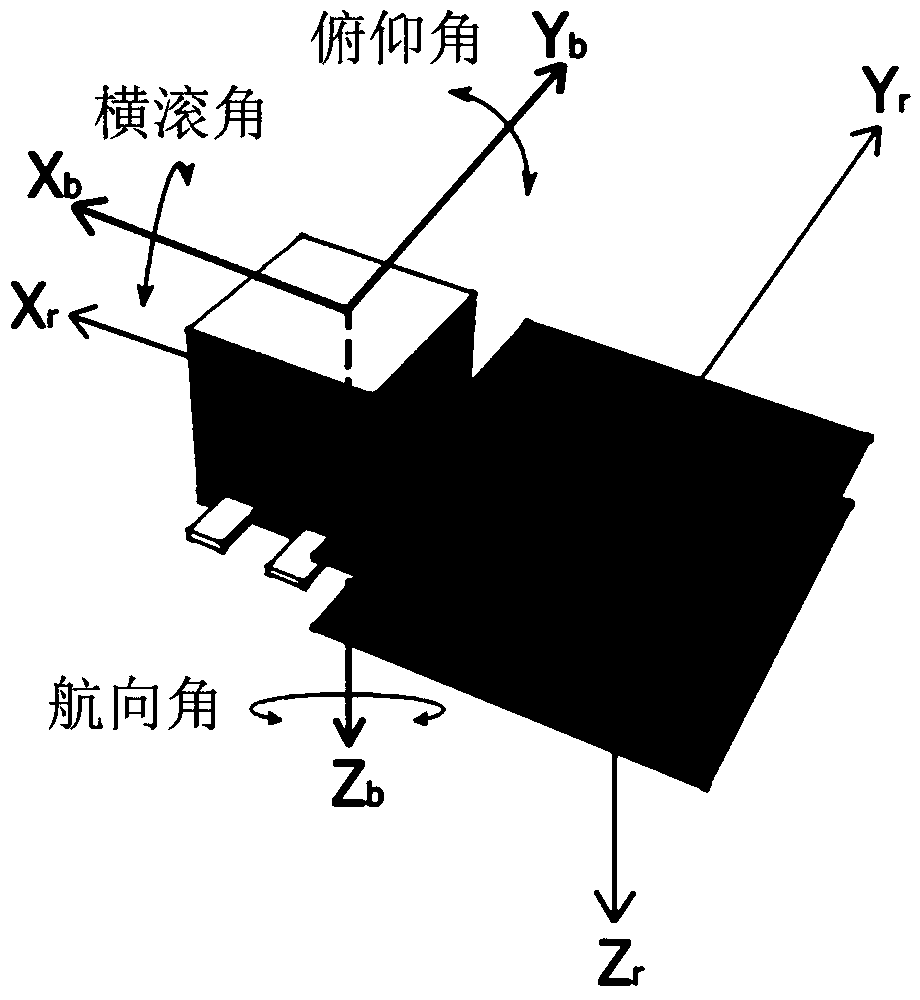
[0038] Such as figure 1 It is a flow chart of the method of the present invention. Gyroscopes, accelerometers, and geomagnetic sensors are used to collect the components of the angular velocity, acceleration, and magnetic intensity data corresponding to the current attitude of the target on the three sensitive axes, and the Kalman filter is used to fuse the above three sensor data and calculate the target. The attitude information of , the sensor body coordinate system represented by b and the space coordinate system represented by r are defined as figure 2 As shown, the specific method is as follows:
[0039] Step 1. Time update the target attitude information through the Kalman filter:
[0040] The time update equation of the discrete Kalman filter is as follows:
[0041]
[0042] where the state vector in the time update equation consists of a r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More