A mechanical arm type endoscopic biopsy forceps
An endoscope and robotic arm technology, applied in the field of medical diagnostic instruments and equipment, can solve the problems of biopsy forceps sampling blind area, easy sampling control, etc., and achieve the effects of easy control, accurate quantitative control, and accurate positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to better understand the above technical solutions of the present invention, further detailed description is given below in conjunction with the accompanying drawings and embodiments.
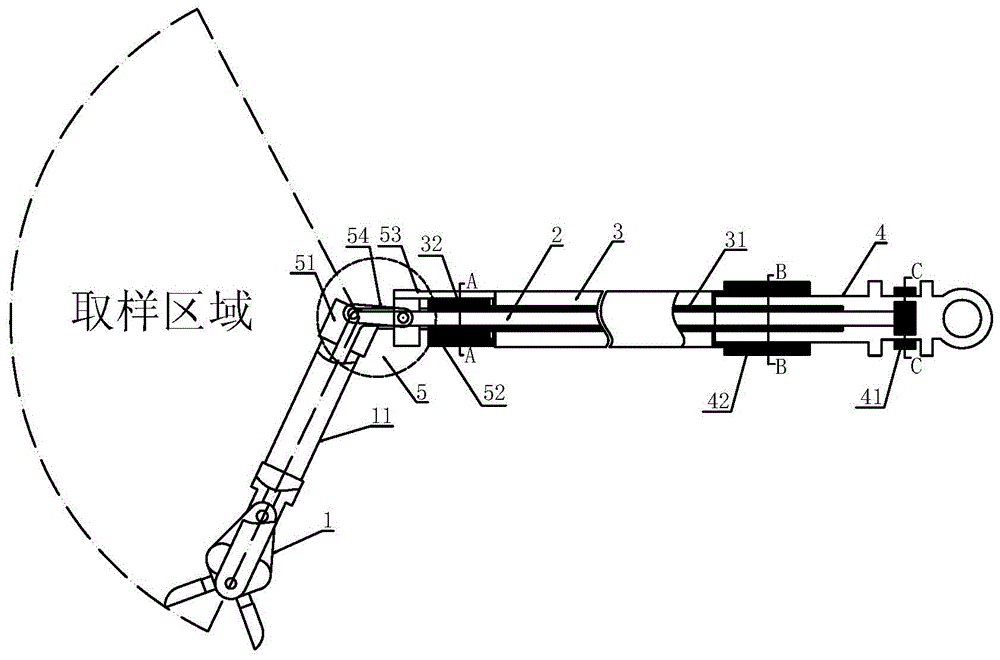
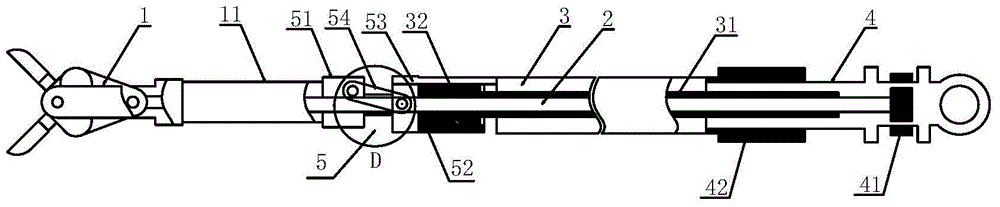
[0038] An embodiment of the robotic arm type endoscopic biopsy forceps of the present invention is as follows: figure 1 and figure 2 As shown, it includes a pliers head 1, a control wire 2, a flexible outer tube 3 and an operating rod 4; the pliers head operating slide handle 41 on the operating rod 4 is connected to the pliers head 1 through the manipulation wire 2, and controls the pliers head 1 opening and closing; for the connection structure of the pliers operating sliding handle 41 and the operating rod 4, see Figure 7 .
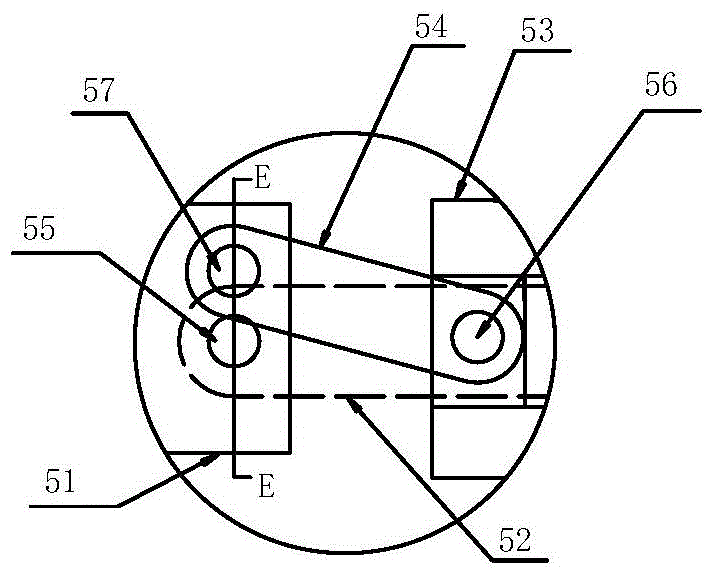
[0039]The endoscope biopsy forceps also includes a mechanical arm composed of a swing arm joint 5 and a swing arm 11;
[0040] The swing arm joint 5 is a crank-slider mechanism composed of a swing arm seat 51, a rotating base 52, a slider 53 and a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More