

Indoor environment feature extraction method based on entropy and gray correlation degree
A grey correlation, indoor environment technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve problems such as feature confusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
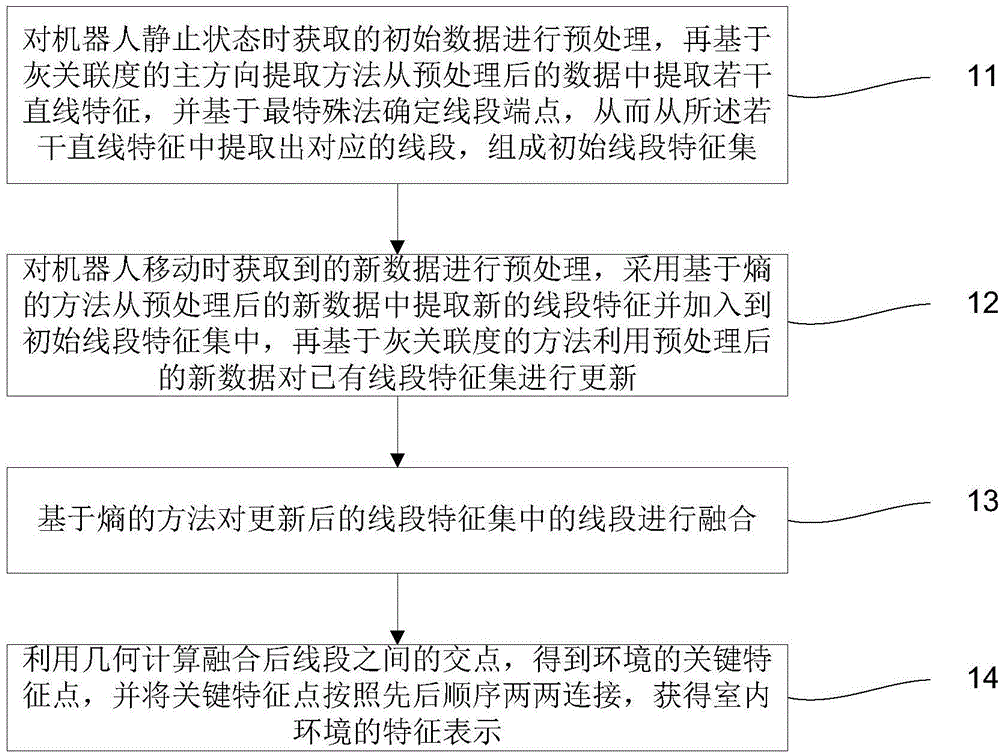
[0083] figure 1 It is a flow chart of an indoor environment feature extraction method based on entropy and gray relational degree provided by Embodiment 1 of the present invention. Such as figure 1 As shown, the method mainly includes the following steps:
[0084] Step 11. Preprocess the initial data obtained when the robot is in a static state, and then extract some straight line features from the preprocessed data based on the main direction extraction method of the gray correlation degree, and determine the endpoints of the line segment based on the most special method, so as to obtain The corresponding line segments are extracted from the above-mentioned several straight line features to form the initial line segment feature set.
[0085] Specifically, this step mainly includes: data preprocessing and initial line segment feature extraction.
[0086] 1. Data preprocessing
[0087] Data preprocessing is mainly to filter the measured values generated due to the measure...
Embodiment 2
[0171] For ease of understanding, the solution of the present invention will be described below in conjunction with specific examples.
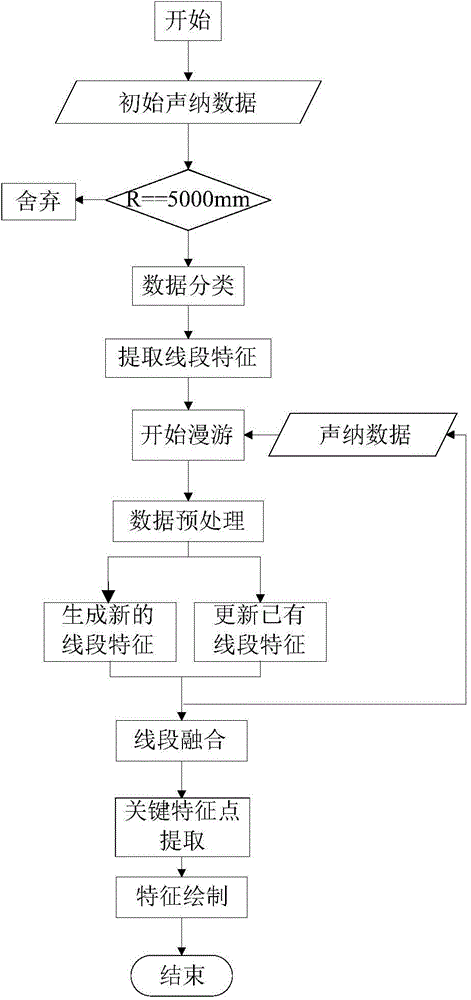
[0172] In this example, 16 sonar sensors equipped with the robot Pioneer 3-DX are used to roam in an unknown environment and collect data through the sonar sensors. Visual Studio 2008 and Matlab R2009a mixed programming are used to realize indoor environment feature extraction. The detailed scheme is the same as Similar to Embodiment 1, the workflow is as follows figure 2 As shown, the specific steps are as follows:
[0173] (1) Use the robot sonar to collect current local environmental data, separate the sonar data points with r<5000mm, and record the filtered data set as c.
[0174] (2) take score in the embodiment thres = 0.9. For data set c, use the self-organizing map to cluster to obtain data set C, and perform line segment feature extraction on each point cluster after clustering, and obtain the initial line segment feature set L o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More