

Auxiliary ultrasonic scanning system of robot based on RGB-D sensor
A robot-assisted, ultrasonic scanning technology, applied in ultrasonic/sonic/infrasonic diagnosis, sonic diagnosis, infrasonic diagnosis, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below using the accompanying drawings and examples.
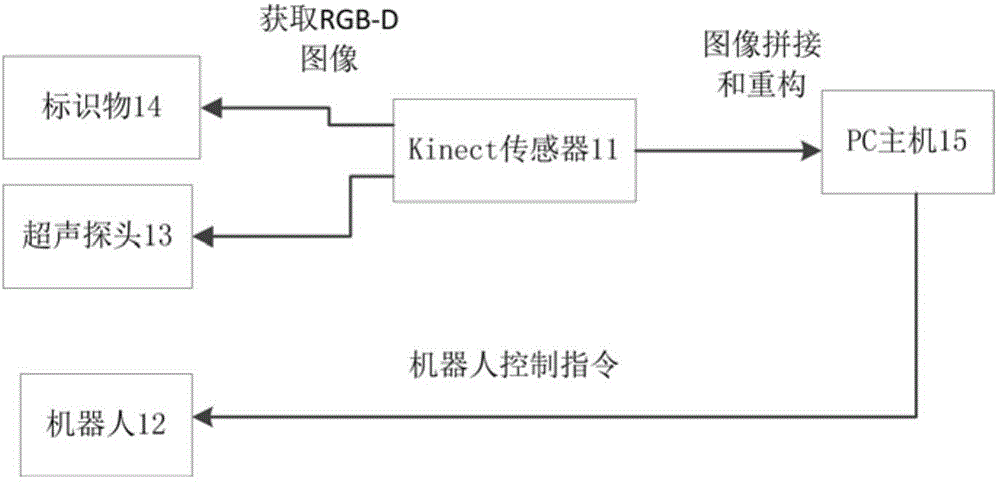
[0015] refer to figure 1 , a RGB-D sensor-based robot-assisted ultrasonic scanning system of the present invention includes a Kinect sensor 11 , a robot 12 , an ultrasonic probe 13 , markers 14 and a host 15 . The Kinect sensor 11 is used to collect RGB color images and depth images of the ultrasonic probe 13 and markers 14, and the image information is transmitted to the host 15, and the host 15 performs processing such as image 3D splicing and image reconstruction, and calculates in real time After processing the 3D shape and pose of the ultrasonic probe 13, the current pose information of the probe 14 and the calculated control commands are sent to the robot 12 to control and guide the robot 12 to hold the ultrasonic probe 13 to a designated position, realizing robot Auxiliary ultrasound scanning purposes.
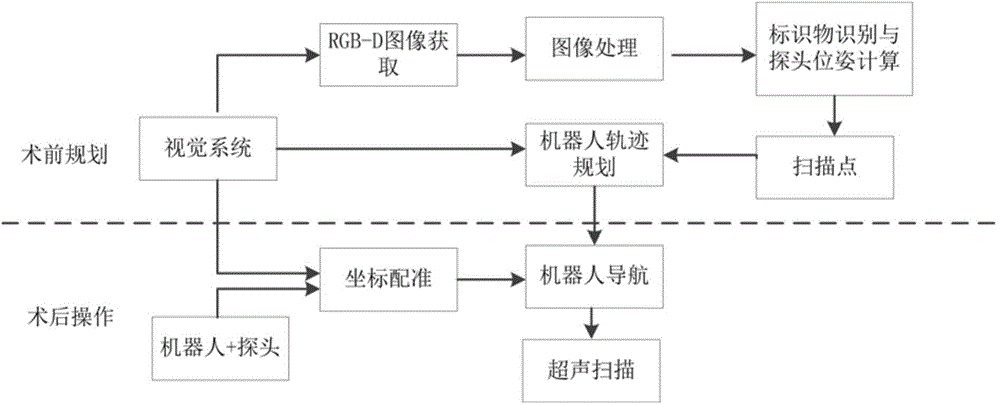
[0016] refer to figure 2 , a robot-assisted ultrasonic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More