

Four-foot-swing wall-climbing robot with driven waist joint
A wall-climbing robot and waist joint technology, which is applied in the field of wall-climbing robots, can solve the problems of poor control, poor flexibility, and difficulty in guaranteeing vertical climbing, and achieve the effects of clear structure, impact energy reduction, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings.
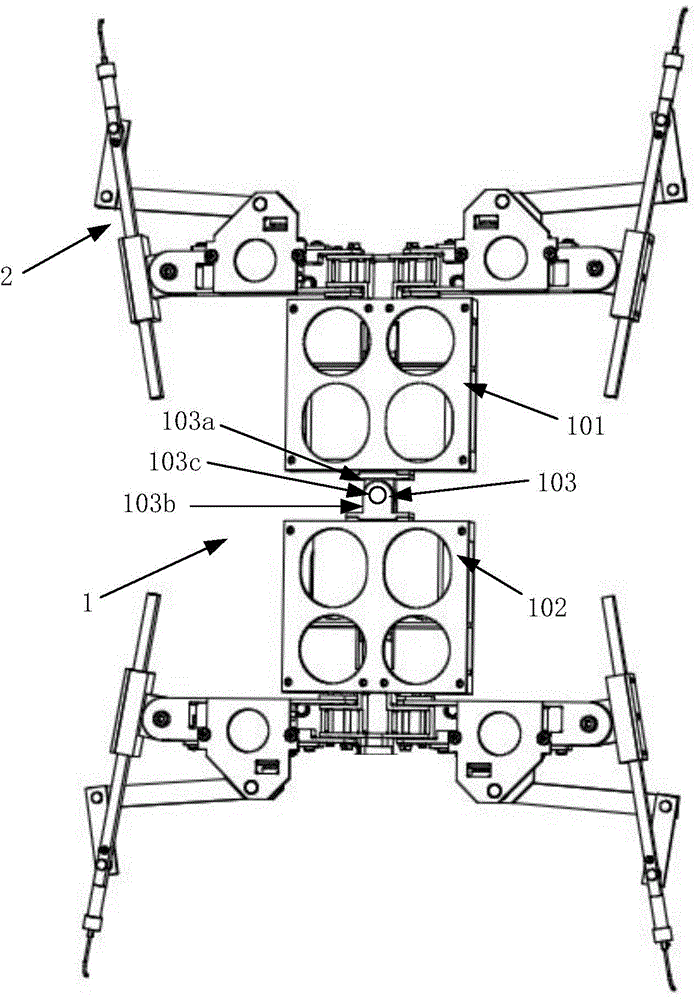
[0031] The quadruped swinging wall-climbing robot with passive waist joints of the present invention includes a body module 1 and a telescopic foot module 2, such as figure 1 As shown; wherein, the body module 1 includes an upper body 101, a lower body 102 and a waist joint 103; the upper body 101 and the lower body 102 have the same structure, both of which are rectangular structures, made of aluminum alloy, and have a hollow cavity , with lightening holes on the surface; the cavity is used to install batteries and control boards. The upper body part 101 and the lower body part 102 are arranged symmetrically up and down, and are connected by a waist joint 103 . The waist joint 103 is composed of an upper ear piece 103a, a lower ear piece 103b and a pin shaft 103c; wherein, the upper ear piece 103a and the lower ear piece 103b are fixedly installed on the lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More