

Four-footed robot
A quadruped robot and robot technology, applied in the field of robotics, can solve problems such as complex movement trajectory of the foot end, lack of anti-overturning function, unstable output force, etc., and achieve the effect of simple and ingenious structure, smooth movement, and fast movement trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof. However, the protection scope of the claims of the present application is not limited to the description scope of the embodiments.
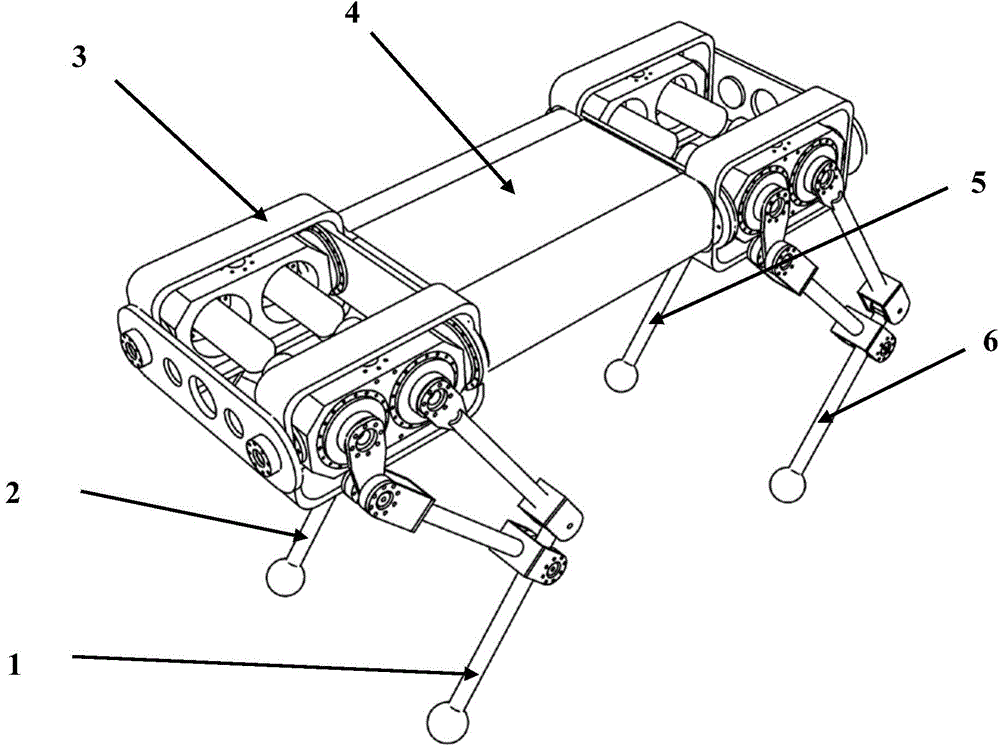
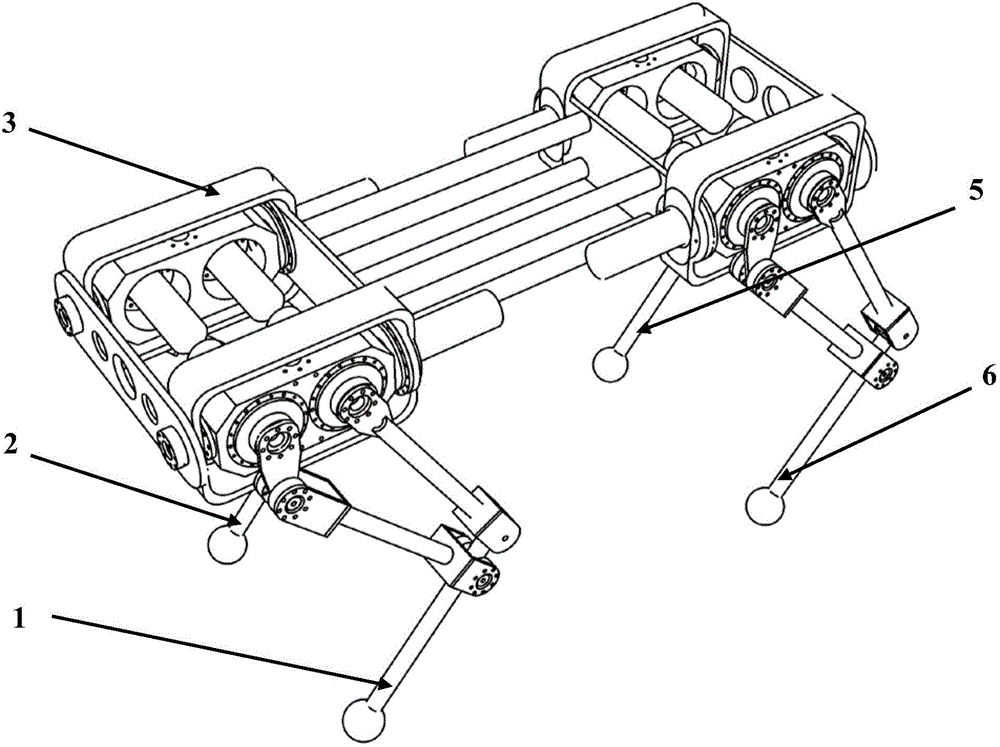
[0020] A kind of quadruped robot of the present invention's design (abbreviation robot, see Figure 1-6 ), characterized in that the robot is mainly composed of a frame 3, a dust cover 4, a left front leg 5, a right front leg 6, a left rear leg 2 and a right rear leg 1, wherein the left front leg 5, the right front leg 6, and the left rear leg 2 1. The structure of the right rear leg 1 is exactly the same, and it is evenly distributed and installed on both sides of the long side of the frame 3, and the dust cover 4 and the frame 3 are fixedly connected by screws. The structure of the four mechanical legs of the robot in the present invention is exactly the same, and they are all composed of four rod mechanisms. According to the fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More