

Soccer robot dual meet system based on global vision and remote collaborative control
A football robot and collaborative control technology, applied in the field of artificial intelligence systems, can solve the problems of primary and middle school students' difficulty in understanding, weak operability, and low participation, and achieve the effect of improving viewing, increasing participation, and enhancing operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will now be described in further detail in conjunction with the accompanying drawings and preferred embodiments. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
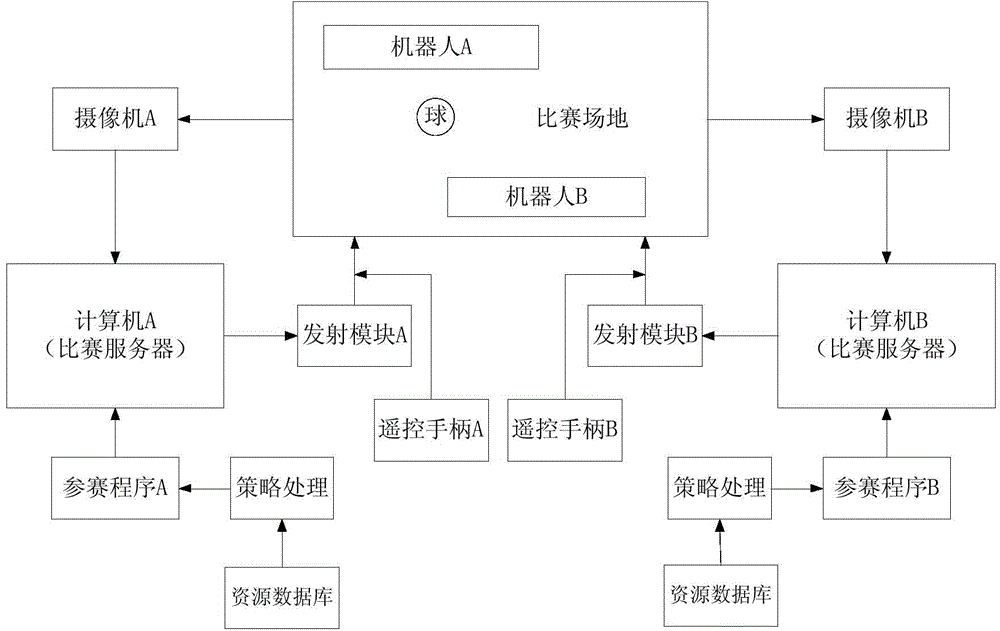
[0016] Such as figure 1 As shown, the system includes a robot car, a digital image acquisition device, a computer, a USB wireless transmitter and a remote control device in terms of hardware equipment. In terms of function, it includes four subsystems: global vision, intelligent decision-making, USB wireless communication and robot car. Among them, in the visual subsystem and the decision-making subsystem, various resource databases are also added, such as the skin library (usable for setting the skin of the operation interface), the color code database (containing the range of each color block), the basic graphics library ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More