

Unmanned aerial vehicle attitude control system and method based on self-adaption complementation fusion
A technology for controlling system and aircraft attitude, applied in attitude control and other directions, can solve the problems of aircraft and its control system design difficulties, sensor control performance impact, complex state and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Below in conjunction with accompanying drawing, the present invention is described in further detail:
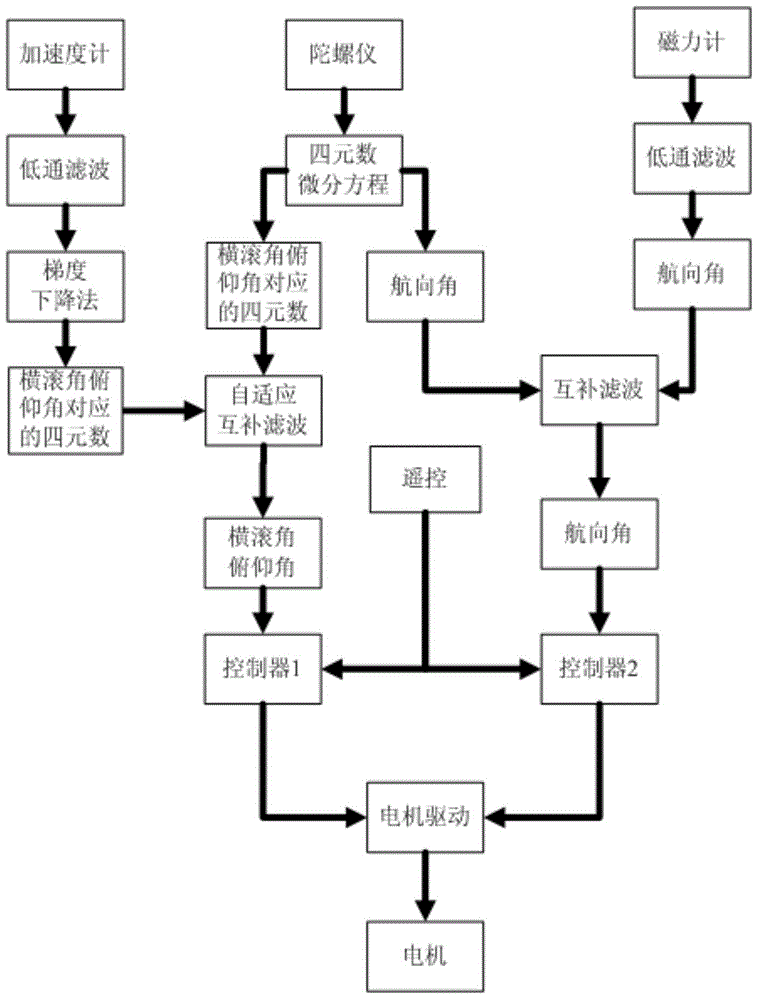
[0051] see Figure 1 to Figure 4 , a UAV attitude control system based on adaptive complementary fusion, including a motor and a motor driver connected thereto, the control signal input end of the motor driver is connected to a parallel first controller and a second controller;
[0052]The signal input end of the first controller is connected to the signal output end of the self-complementary adaptive filter, and the input end of the complementary adaptive filter is respectively connected to the first low-pass filter and the quaternion differential equation module. The input end of a low-pass filter is connected to the signal output end of the accelerometer, and the signal input end of the quaternion differential equation module is connected to the signal output end of the gyroscope;
[0053] The signal input end of the second controller is connected to the signal ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More