

Robot motion path off-line programming method and system
A technology of robot motion and robot kinematics, applied in the field of robot programming, can solve problems such as restricted extraction of motion path data, and achieve the effects of wide application range, high work efficiency and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
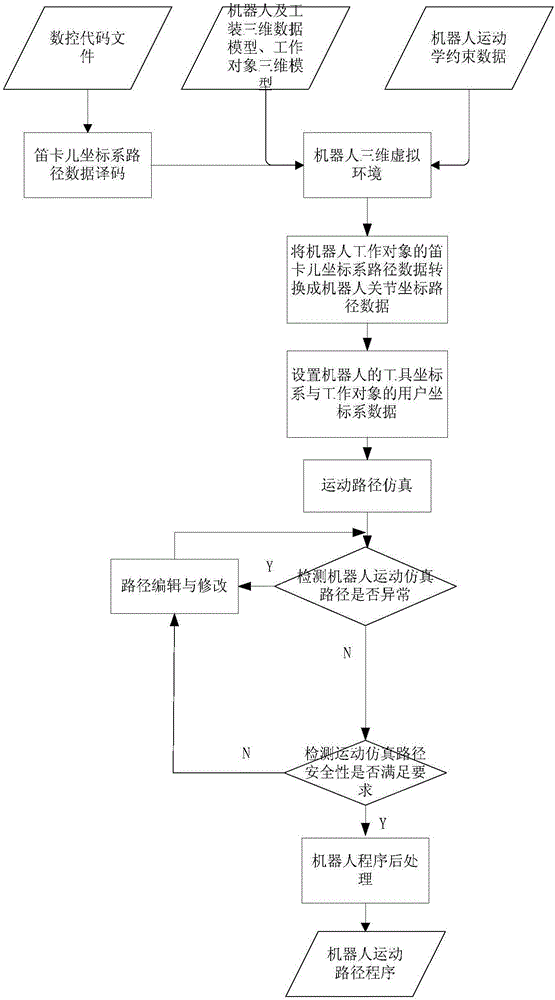
[0059] Such as figure 1 As shown, this embodiment discloses a method for off-line programming of robot motion path, characterized in that the steps are as follows:
[0060] S1. Set robot kinematics constraint conditions; obtain the 3D model of the robot and its tooling; obtain the 3D model of the robot work object; scan the 3D entity data of the robot work object, obtain the Cartesian coordinate system path data of the robot work object and Generate corresponding numerical control code file; In the present embodiment, the Cartesian coordinate system path data of robot work object is obtained by CAD / CAM (Computer Aided Design / computer Aided Manufacturing, computer aided design / computer aided manufacturing) software platform, CAD / CAM The software platform outputs the Cartesian coordinate system path data of the robot work object in the form of a NC program.
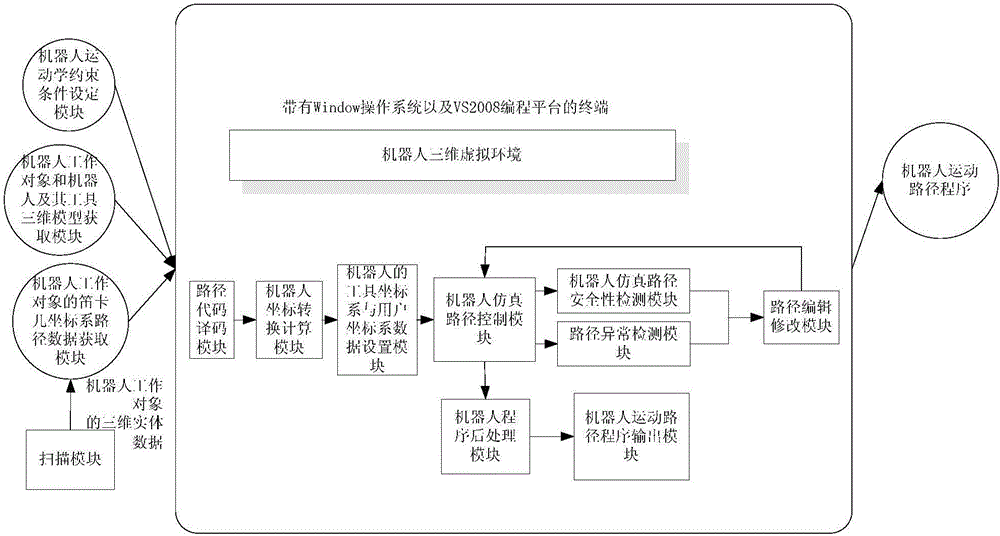
[0061] S2. Build a three-dimensional virtual environment for the robot on a computer terminal with an operating platform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More