UAV (unmanned aerial vehicle) assisted landing visual guiding method and airborne system based on ground cooperative mark
A vision-guided, unmanned aerial vehicle technology, applied in the field of flight navigation control, can solve problems such as system reliability decline, increase landing locations and application limitations, and achieve the effects of small errors, simple methods, and improved efficiency and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
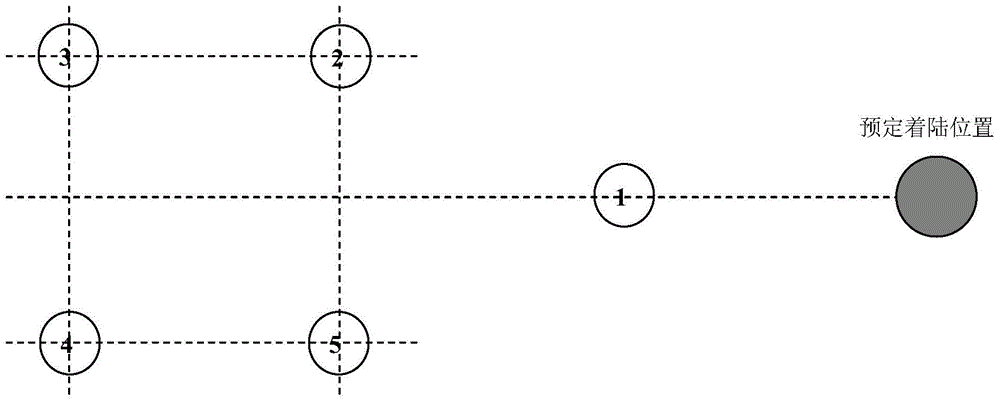
[0107] as attached figure 2 As shown, the ground cooperation sign includes 5 circular luminous bodies, and 4 of them are arranged in a square, and 1 circular luminous body is located outside the square, and this circular luminous body is used as a vertex light. The distance between the center of the predetermined landing position and the centroid of the apex light is set as ΔL.
[0108] Each circular illuminant is a solid illuminant with a diameter of 300mm wound by LED strip lights. Arranged as above to form an arrow shape, it is easy to track and identify the light at the top of the arrow, that is, the vertex light. Each LED lamp is powered by a battery in parallel.
Embodiment 2
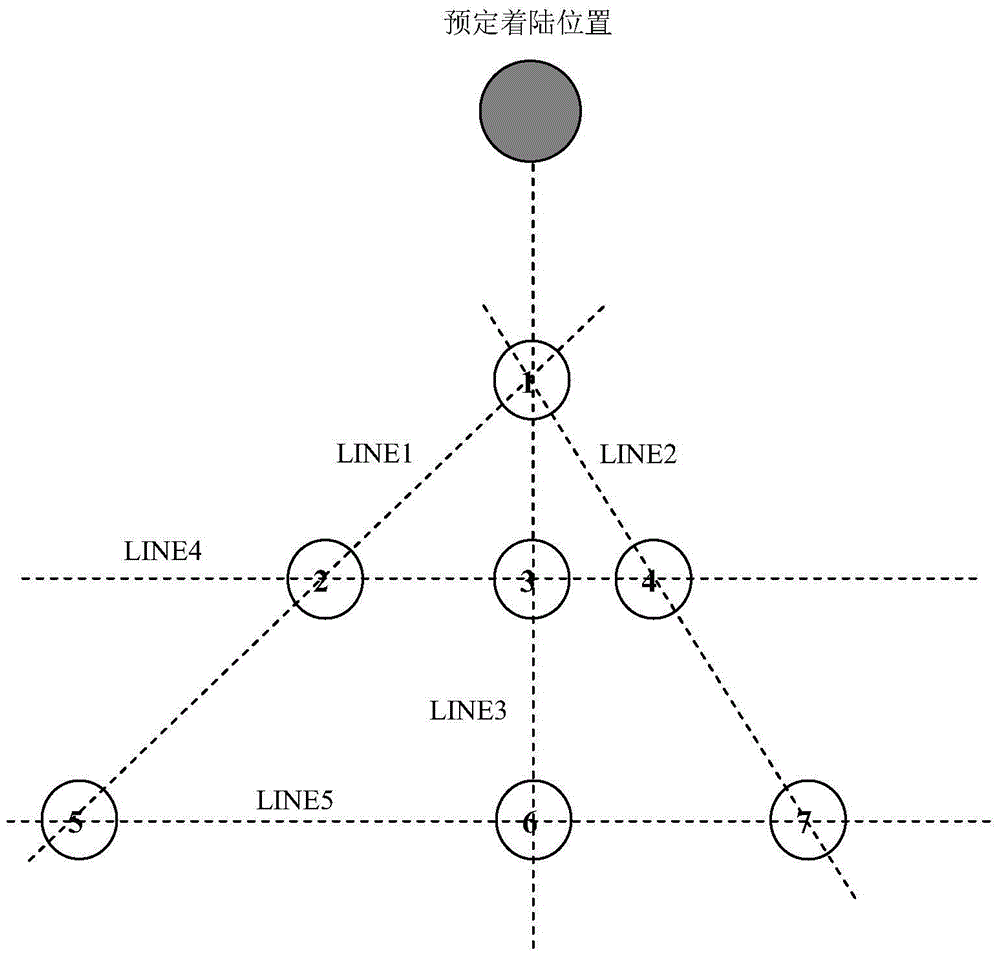
[0110] as attached image 3 As shown, the ground cooperation sign includes 7 circular illuminants, and each circular illuminant is a solid LED light of equal size, of which the LED light No. 1 is the apex light and its radius is R,
[0111] ①The distance between LED light No. 2 and LED light No. 1 is L 1-2 =6.8R, the distance between No. 3 LED lamp and No. 1 LED lamp is L 1-3 =4.8R, the distance between LED lamp No. 4 and LED lamp No. 1 is L 1-4 =5.6R, the distance between LED lamp No. 5 and LED lamp No. 1 is L 1-5 =13.6R, the distance between LED light No. 6 and LED light No. 1 is L 1-6 =9.6R, the distance between LED light No. 7 and LED light No. 1 is L 1-7 =11.2R; said distance is the distance between the centroids of each LED lamp;
[0112] ② The centroids of LED lights No. 1, LED lights No. 2 and LED lights No. 5 are on a straight line and the line is LINE1; the centroids of LED lights No. 1, LED lights No. 3 and LED lights No. 6 are on a straight line and parallel Le...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com