

SLAM method through cooperation of multiple quadrotor unmanned planes based on vision
A quadrotor UAV and UAV technology, applied in the UAV field, can solve problems such as interference and lack of GPS signals, achieve good maneuverability and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
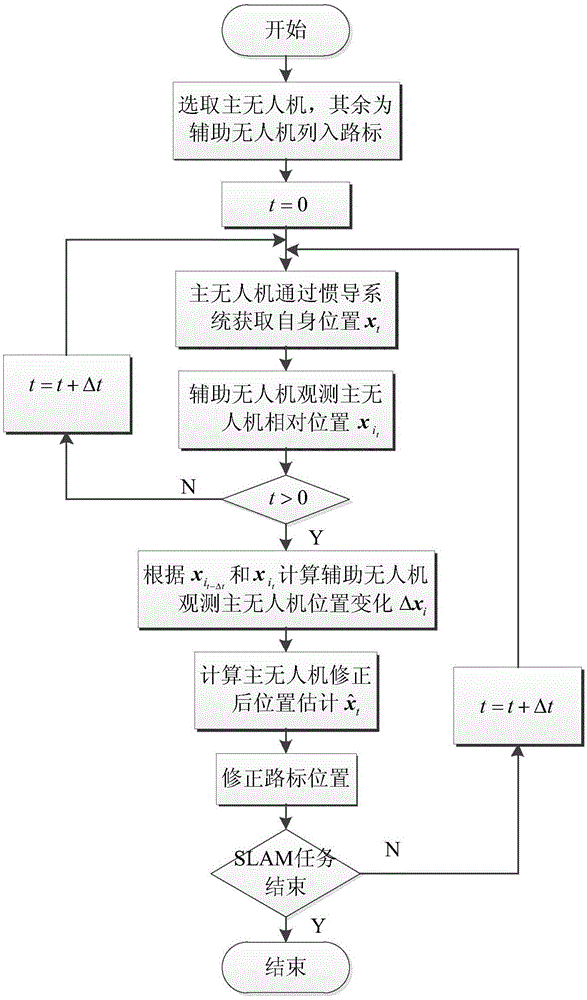
[0033] like figure 1 As shown, the vision-based multi-quadrotor cooperative SLAM method of the present invention is as follows:
[0034] Select one quadrotor UAV UAV1 as the main UAV, and the other two quadrotor UAVs UAV2 and UAV3 as auxiliary UAVs, and ensure that UAV2 and UAV3 are within the observation range of UAV1. All three quadrotor drones carry cameras and inertial navigation units.
[0035] UAV1 performs SLAM tasks, and the total number of landmarks is M. UAV2 and UAV3 are also used as landmarks to estimate and update. The onboard camera is used to collect image information, and the onboard inertial navigation unit is used to obtain the attitude angle and acceleration information of the UAV. Formula (1) joint probability distribution of the main UAV SLAM
[0036] p ( x t ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More