

A five-degree-of-freedom parallel robot mechanism with two-dimensional rotation and three-dimensional movement
A technology with three-dimensional movement and degrees of freedom, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex kinematics solutions, strong kinematic coupling, and small working space, and achieve easy realization of large drives and clear motion forms , the effect of strong overload capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
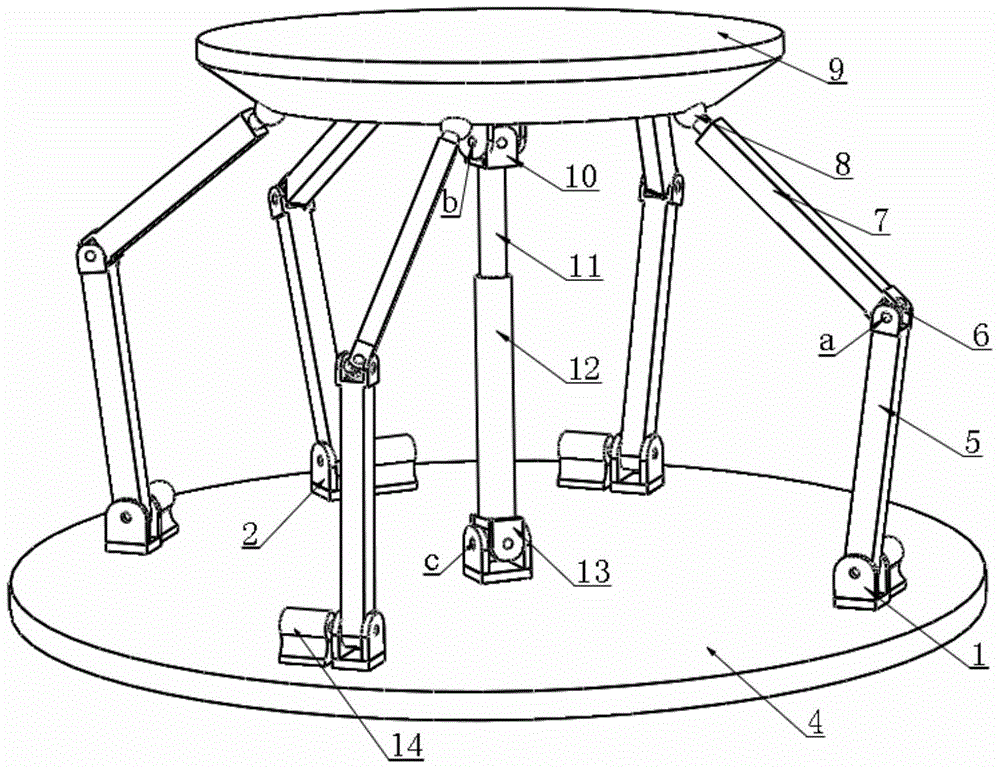
[0033] figure 1 The shown two-dimensional rotating three-dimensional mobile five-degree-of-freedom parallel robot mechanism includes a base 4 and a moving platform 9, and the moving platform 9 and the base 4 are connected through five RUS-type drive branches with identical structures and a constraint branch.
[0034] The five RUS-type drive branches include the revolving pair, the first lower link 5, the first Hooke hinge 6, the first upper link 7 and the ball pair 8, and the revolving pair is the first revolving pair 1 or the second revolving pair 2.
[0035] On the lower surface of the moving platform 9, ball pairs 8 are evenly arranged on the same circle centered on the center of the lower surface of the moving platform 9.
[0036] On the upper surface of the frame 4, four first rotating pairs 1 are evenly arranged on the same circle centered on the center of the upper surface of the frame 4, and the interval angle between adjacent first rotating pairs 1 is 90°.
[0037] ...
Embodiment 2
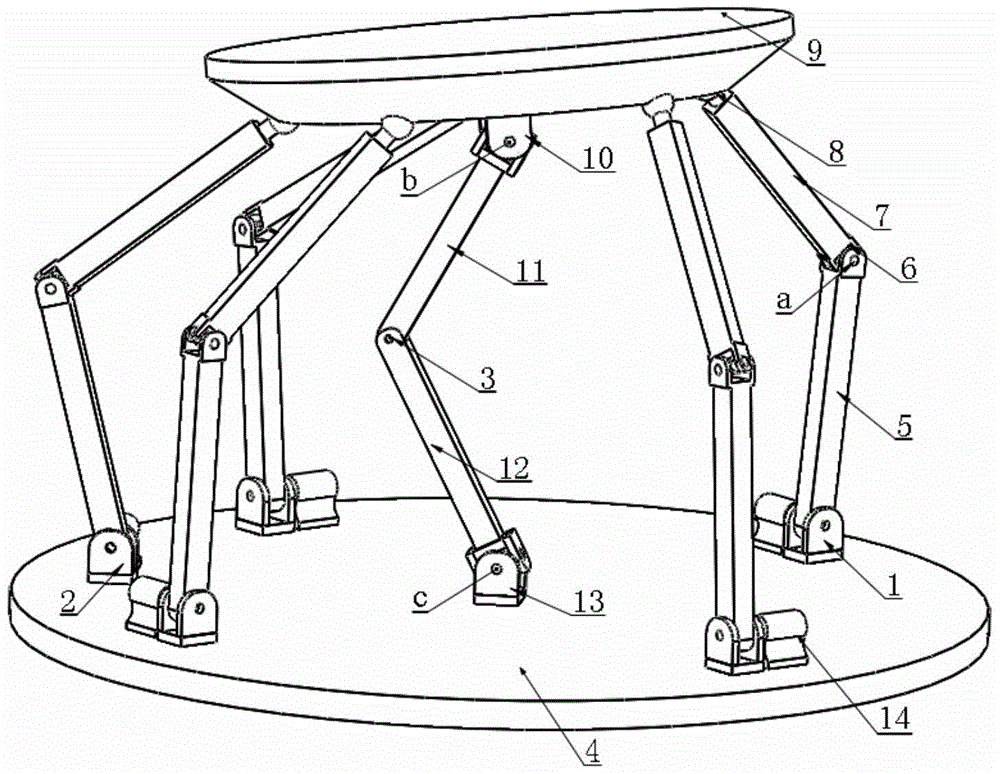
[0043] figure 2 The shown two-dimensional rotating three-dimensional mobile five-degree-of-freedom parallel robot mechanism includes a base 4 and a moving platform 9. The moving platform 9 and the base 4 are connected by five RUS-type drive branches with identical structures and one URU-type constraint branch. .
[0044] The five RUS-type drive branches include the revolving pair, the first lower link 5, the first Hooke hinge 6, the first upper link 7 and the ball pair 8, and the revolving pair is the first revolving pair 1 or the second revolving pair 2.
[0045] On the lower surface of the moving platform 9, ball pairs 8 are evenly arranged on the same circle centered on the center of the lower surface of the moving platform 9.
[0046] On the upper surface of the frame 4, four first rotating pairs 1 are evenly arranged on the same circle centered on the center of the upper surface of the frame 4, and the interval angle between adjacent first rotating pairs 1 is 90°.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More