

An underwater high-simulation robot fish
A technology of robotic fish and fish skin, applied in the direction of mechanical gear transmission, non-rotating propulsion elements, etc., can solve the problems of high cost, multi-joints, complex structure, etc., and achieve the effect of simple structure, beautiful swimming, and reasonable design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
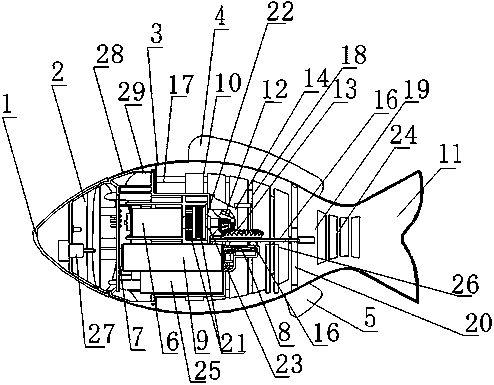
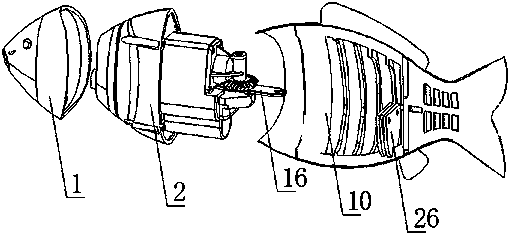
[0024] Such as figure 1 and figure 2 As shown, an underwater highly simulated robotic fish mechanism and system includes a front shell 1, a control box 2, a fish skin 3, a dorsal fin 4 and an anal fin 5, and also includes a power mechanism and a tail swing mechanism, and the power mechanism is located inside the control box 2 The power mechanism includes a drive motor 6, a main control circuit 7, a slave control circuit 8 and a power supply 9, the master control circuit 7 is a master control board, and the slave control circuit 8 is a slave control board; the swing tail mechanism includes a crank mechanism, a fishbone 10 and Tail fin 11; the crank mechanism comprises a first bevel gear 12, a second bevel gear 13, a bear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More