

Attitude control method of four-rotor aircraft
A four-rotor aircraft and attitude control technology, applied in the direction of attitude control, etc., can solve the problems that the control performance is difficult to be guaranteed, the non-linear items and the coupling effect of each channel are not considered, and the control effect is poor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
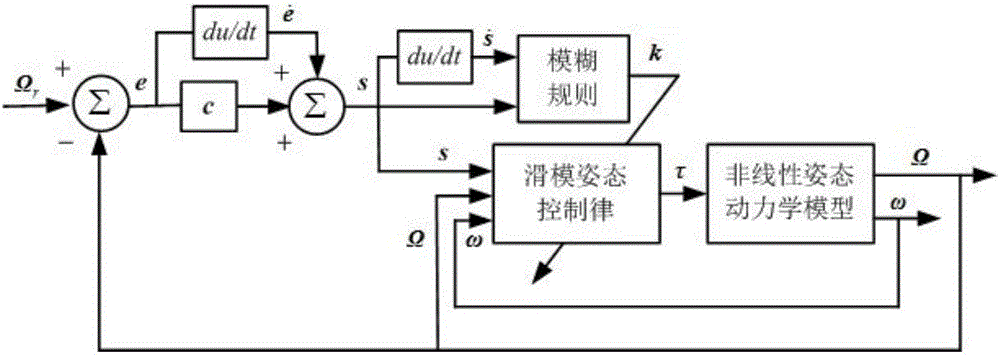
[0089] A method for attitude control of a quadrotor aircraft, the specific steps of which are as follows:
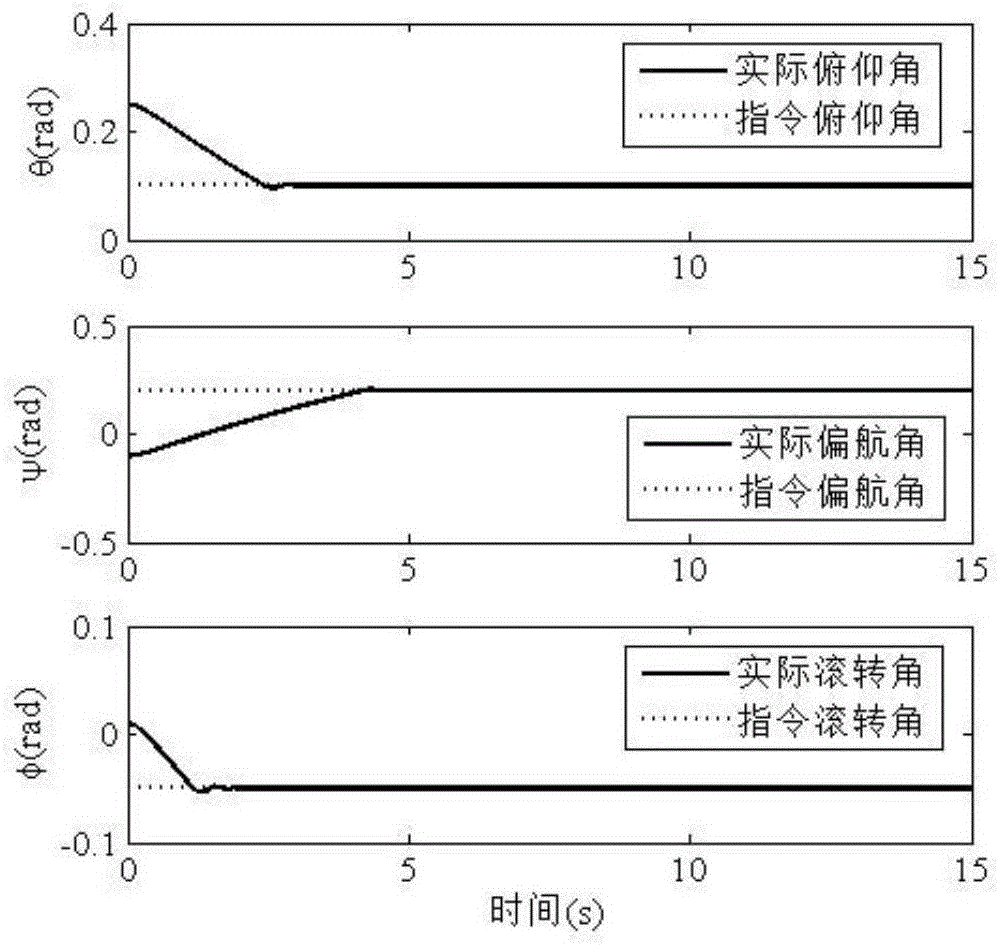
[0090] Step 1: Give command attitude angle
[0091] The given command attitude angle is Ω r =[0.1rad,0.2rad,-0.05rad] T , θ r 、ψ r , φ r are command pitch angle, yaw angle and roll angle respectively.
[0092] Step 2: Calculate the amount of error
[0093] Calculate the error between the command attitude angle and the actual attitude angle: e=Ω r -Ω=[θ r -θ,ψ r -ψ,φ r -φ] T , where, Ω=[θ,ψ,φ] T is the actual attitude angle, θ, ψ, φ are the actual pitch angle, yaw angle and roll angle respectively, which are continuously changing values.
[0094] Step three:
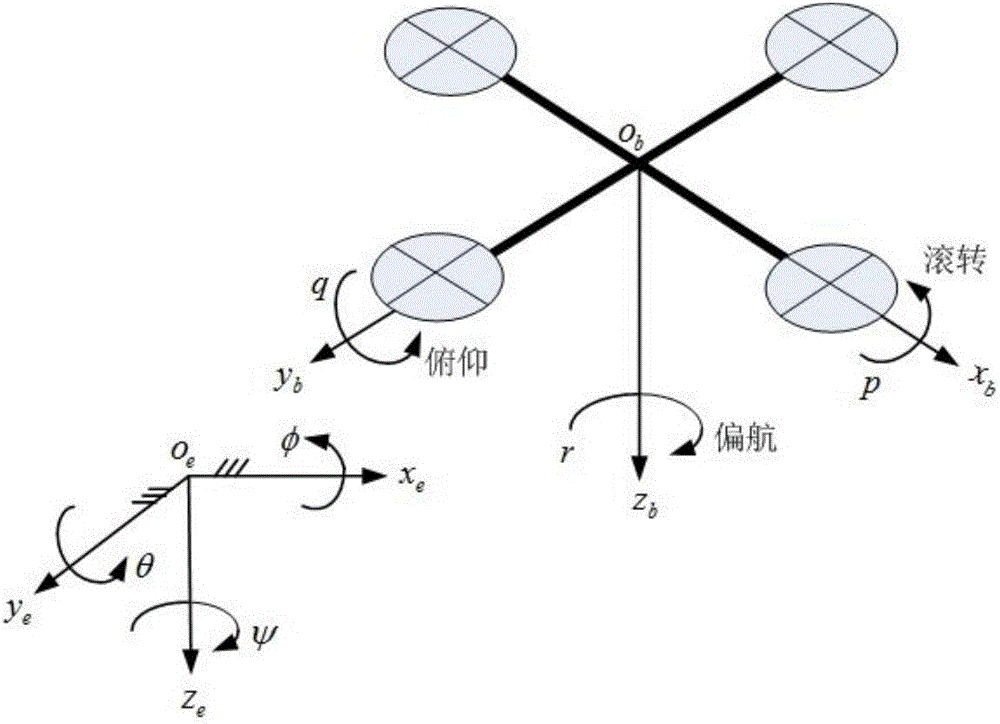
[0095] 1) Establish a quadrotor aircraft attitude dynamics model
[0096] The attitude kinematics equation of the quadrotor aircraft is:
[0097] Ω · = J ( Ω ) ω - - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More