

A motion-body attitude event-triggered control method with actuator saturation problem
A technology of event triggering and control methods, applied in the direction of attitude control, etc., can solve the problem of excessive data load of the control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] Below in conjunction with accompanying drawing, each part design method in the present invention is further described:
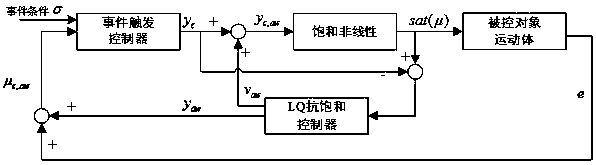
[0084] The present invention "a motion body attitude event trigger control method with actuator saturation problem", see figure 1 As shown, the specific steps are as follows:
[0085] Step 1: Given expected tracking value
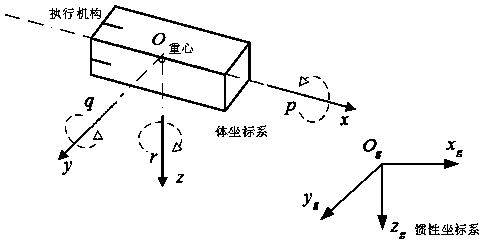
[0086] 1) if figure 2 As shown, the body coordinate system is established with the center of mass of the moving body as the origin ;Establish an inertial coordinate system with any point on the ground as the origin , where the origin For any point on the ground, pointing north, pointing east, point to the center of the earth;
[0087] 2) The given expected attitude angle is , which can be a function of time or path , can also be a fixed value ;
[0088] 3) Given the desired speed as , which can be a function of time or path , can also be a fixed value .
[0089] Step 2: Calculate attitude angle tracking...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More