

Spacecraft attitude stability control method by using biasing tether
A stable control method and space vehicle technology, applied in the direction of attitude control, aerospace vehicle guidance device, etc., can solve the problem of attitude/orbit coupling control that has not been studied in depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] The present invention is described in further detail below in conjunction with accompanying drawing:
[0067] Such as figure 1 Shown, the present invention comprises the following steps:
[0068] The first step is to establish a system dynamics model:
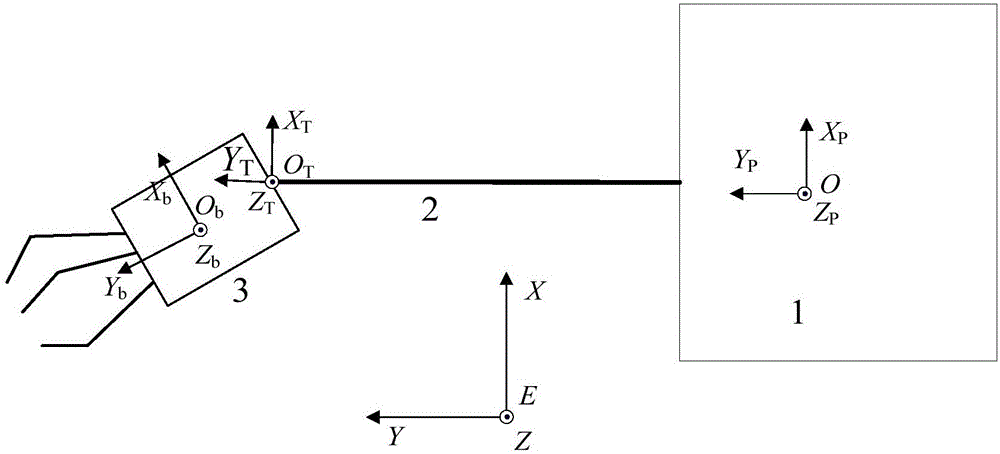
[0069] EXYZ is the geocentric inertial system, OX P Y P Z P For platform track system, OX P Y P The plane is the orbital plane, O T x T Y T Z T is the tether coordinate system, O b x b Y b Z b is the body coordinate system of the operating mechanism. Ignore the out-of-plane motion of the system, that is, assume the EZ axis, OZ P Axis, O T Z T Axis, O b Z b Axes parallel to each other, EXY, OX P Y P , O T x T Y T , O b x b Y b Coplanar. The above four coordinate systems can be obtained by one rotation. Let the coordinate system O T x T Y T Z T with coordinate system OX P Y P Z P The included angle is α, the coordinate system O b x b Y b Z b with coordinate system OX P Y P Z P The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More