

Multi-source information fusion based high precision motion track detection system
A technology of multi-source information fusion and motion trajectory, which is applied in the direction of measuring devices, surveying and navigation, instruments, etc., can solve the problems of not improving the accuracy and dimension of target positioning and tracking, low positioning accuracy, and a single amount of information, and achieve high stability and fast motion detection, enhanced reliability and robustness, improved accuracy and dimensionality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
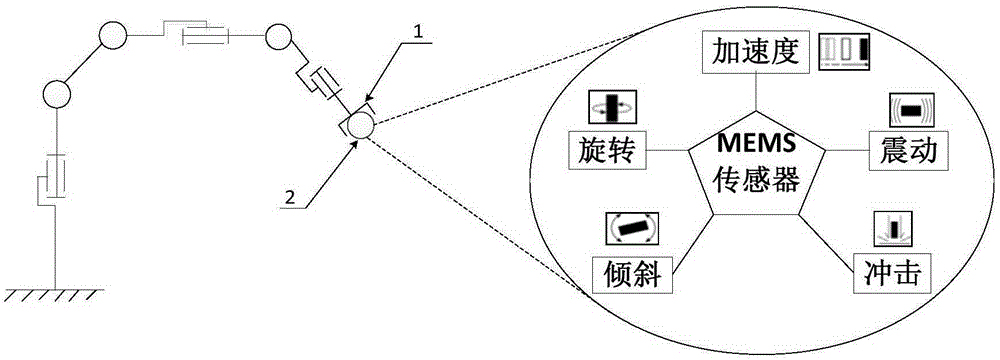
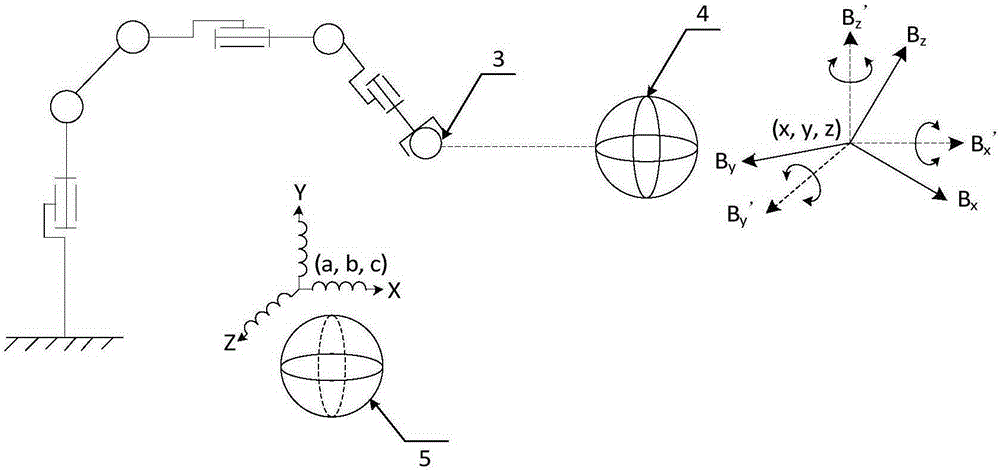
[0040] Taking the end of the flange plate of the mechanical arm as the moving part for measurement, the detailed embodiments of the present invention will be described in conjunction with the accompanying drawings.
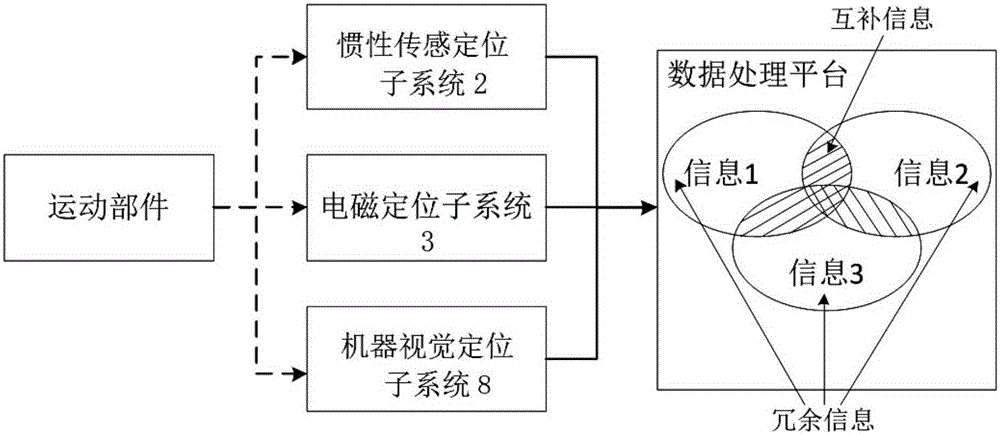
[0041] Such as figure 1 As shown, a high-precision motion trajectory detection system based on multi-source information fusion, the system consists of three modular subsystems of inertial sensor positioning subsystem 2, electromagnetic positioning subsystem 3 and machine vision positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More