

Flight path planning method and device for plant protection unmanned aerial vehicle
A plant protection UAV and trajectory planning technology, applied in the field of UAV route planning, can solve the problems of excessive dependence on human factors, lower operating efficiency, energy consumption, etc., to reduce repeated coverage and leakage rate, The effect of saving energy consumption and chemical consumption, and the total energy consumption of work is small
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer, the following will clearly describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are the present invention. Invented some embodiments, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
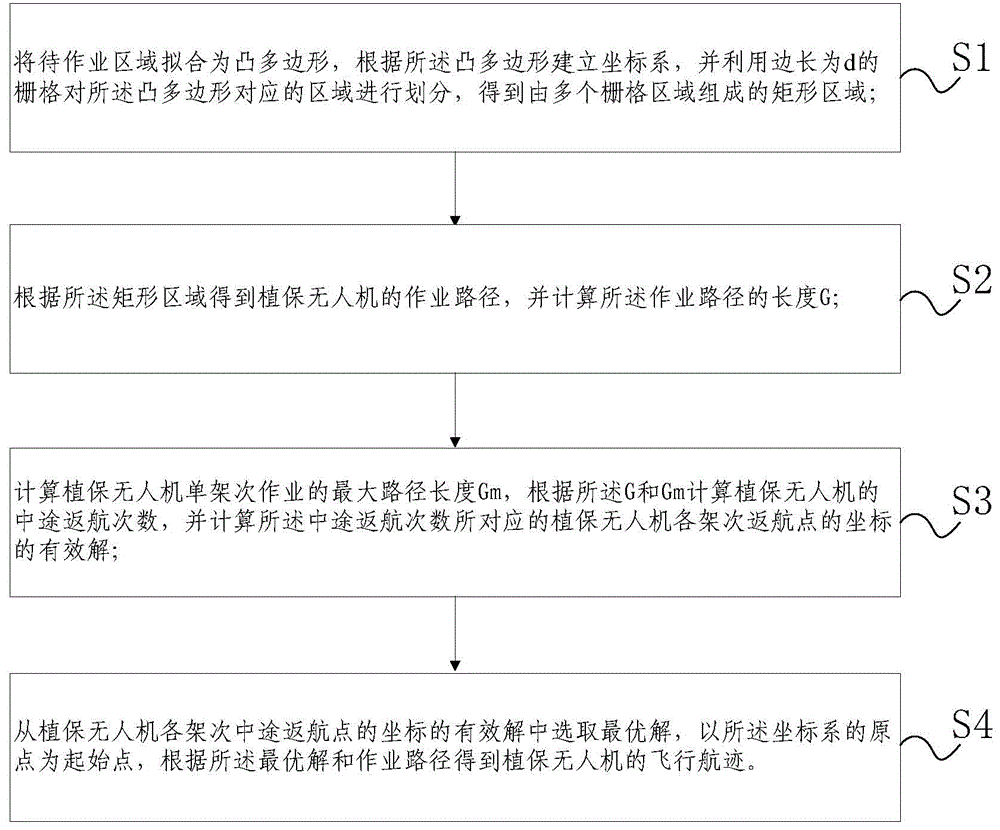
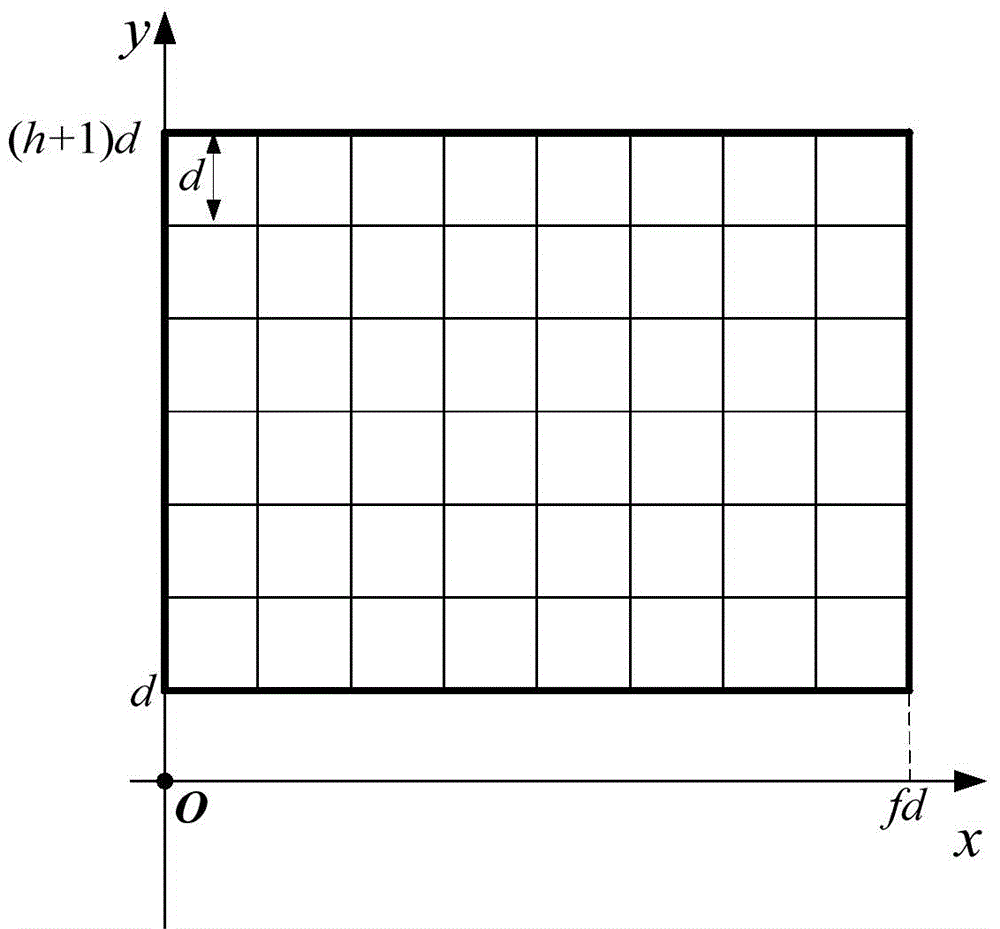
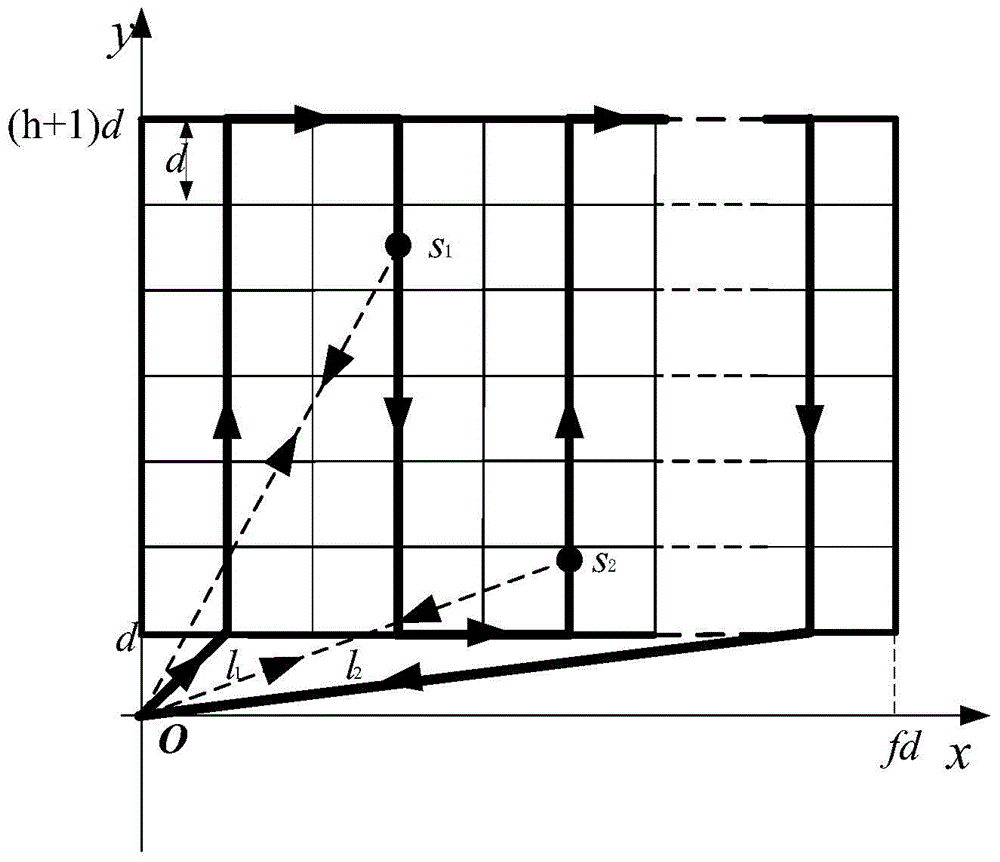
[0021] figure 1 It is a schematic flow chart of an embodiment of a method for trajectory planning of a plant protection drone of the present invention, figure 2 It is a schematic diagram of a rectangular area containing multiple grids obtained in another embodiment of the method for trajectory planning of a plant protection drone of the present ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More