

Radar captive carrying test position parameter automatic binding method based on measurement and control equipment
A technology of test position and measurement and control equipment, which is applied in the direction of radio wave measurement system, navigation through speed/acceleration measurement, instruments, etc., can solve the problem of poor binding reliability, error between actual position parameters and binding position parameters, low binding efficiency, etc. Problems, to avoid human binding errors, high precision, high binding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
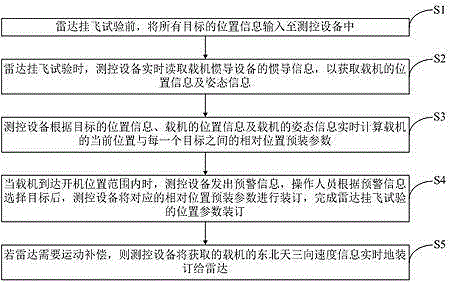
[0047] Such as figure 1 As shown, a method for automatically binding the position parameters of the radar flying test based on the measurement and control equipment includes the following steps:
[0048] S1. Before the radar flight test, input the position information of all targets into the measurement and control equipment;
[0049] S2. During the radar flying test, the measurement and control equipment reads the inertial navigation information of the carrier aircraft's inertial navigation equipment in real time to obtain the position information and attitude information of the carrier aircraft;
[0050] S3. The measurement and control equipment calculates the relative position pre-installed parameters between the current position of the carrier aircraft and each target in real time according to the position i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More