

Multi-unmanned aerial vehicle cooperative tracking type shooting system and shooting method
A tracking shooting and multi-UAV technology, applied in the field of shooting system, can solve the problems of difficult estimation of depth of field information, inability to record the 3D environment of the shooting target, etc., and achieve the effect of solving coordination problems and accurately estimating the depth of field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
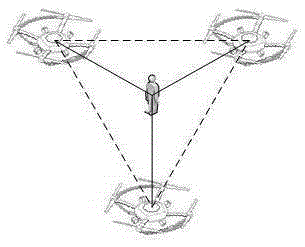
[0043] Figure 5 It is a schematic structural diagram of the shooting system for the master-slave UAV cooperative tracking involved in this embodiment. The shooting system includes a ground processing terminal 1, a main UAV terminal 2 and a slave UAV terminal 3; the master UAV terminal 2 passes through the slave UAV terminal 3 and the ground processing terminal 1 respectively. Connect by means of wireless communication, such as radio frequency, WIFI or Bluetooth. The ground processing terminal 1 sends the location information of the target to the main UAV terminal 2, and the main UAV terminal 2 adjusts its own position according to the location information of the target, and sends its own location information to the slave UAV terminal 2. machine terminal 3, from the drone terminal 3 to adjust its position according to the position information of the master drone terminal 2 and its own setting information; the master drone terminal 2 and the slave drone terminal 3 adjust Afte...
Embodiment 2
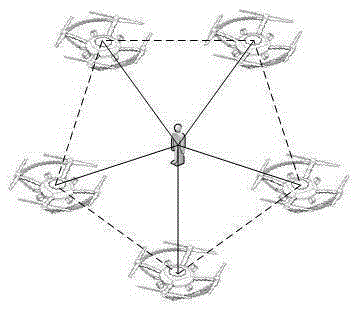
[0055] In Embodiment 1, the UAV includes the main UAV terminal 2 and the slave UAV terminal 3, and the main UAV terminal 2 can only adjust itself according to the set distance information between the main UAV terminal 2 and the target. After obtaining the precise location information of itself, the slave UAV terminal 3 can adjust its own position according to the precise location information of the master UAV terminal 2 and the set master-slave UAV terminal position relationship; If there is a problem with the man-machine terminal 2, then the slave drone terminal 3 cannot continue to work normally. In this embodiment, instead of sending the set distance information to the shooting target only to the main drone terminal 2, the set distance information to the shooting target is sent to all drone terminals (including the main drone terminal 2). UAV terminal 2 and slave UAV terminal 3), all UAV terminals track and photograph the target, that is, all UAV terminals can individually ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More