A multi-station robot abrasive belt polishing machine with an abrasive belt drive rear
A robot abrasive belt and abrasive belt polishing technology, which is applied in the direction of grinding drive device, abrasive belt grinder, grinding/polishing equipment, etc., can solve the problems of reducing the scope of application of polishing machine equipment, reduce programming and operation difficulty, expand The scope of application and the effect of reducing the footprint of the machine
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
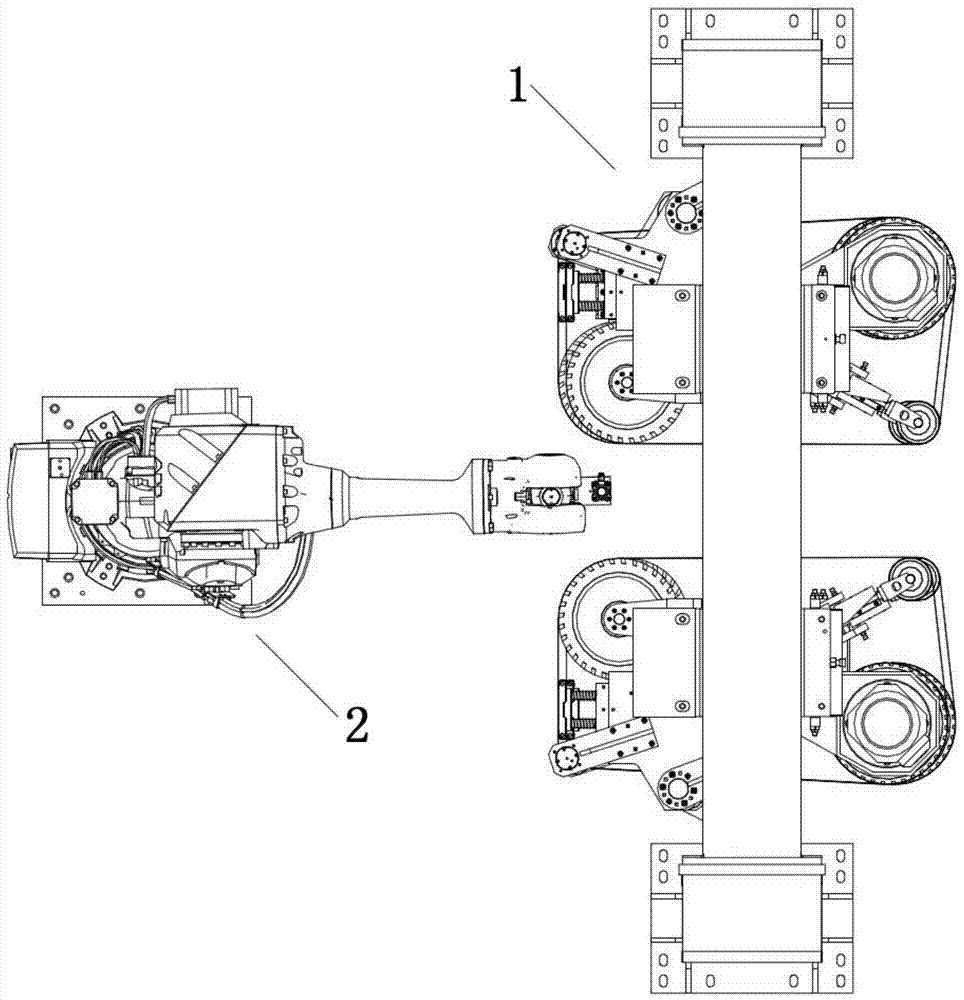
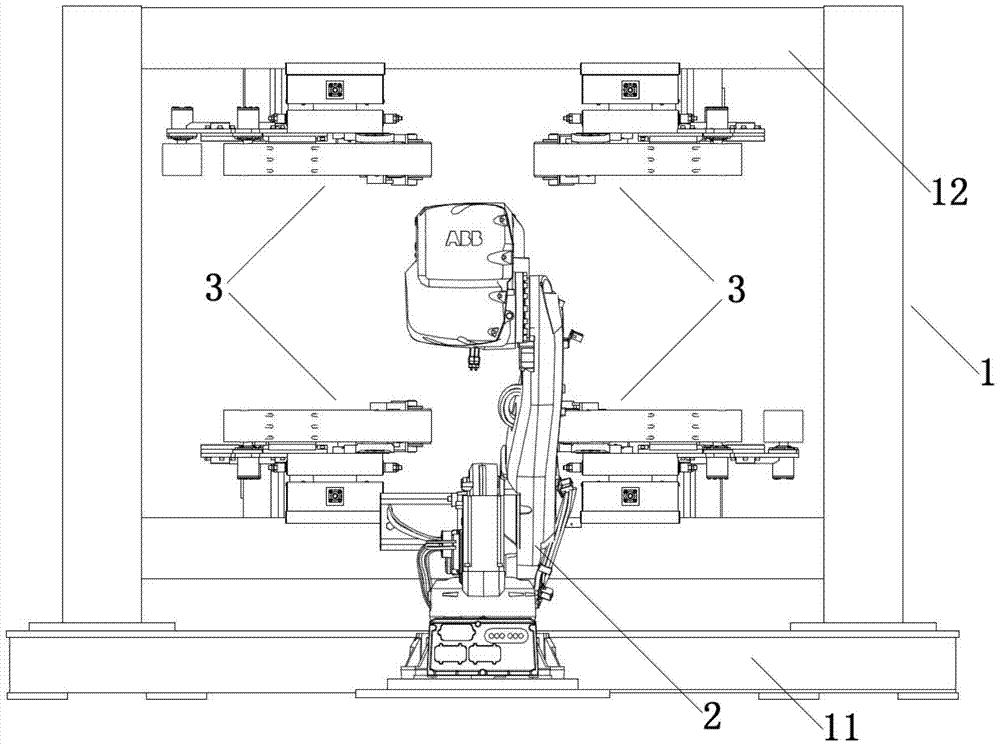
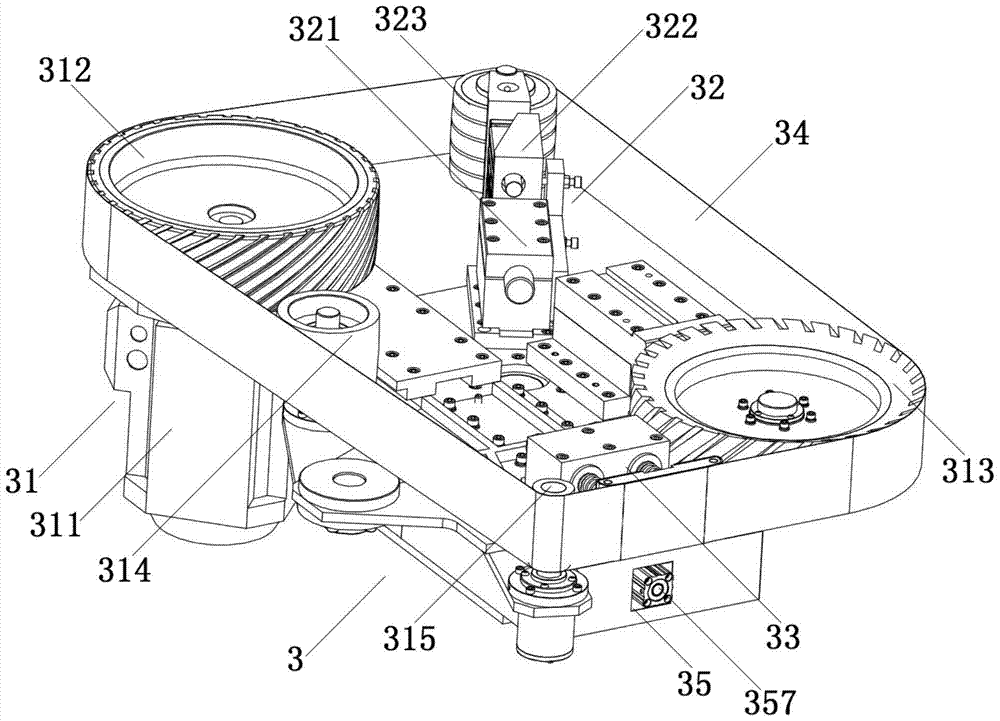
[0026] Such as Figures 1 to 5 As shown, a multi-station robot abrasive belt polishing machine with an abrasive belt drive in the present invention includes an abrasive belt polishing device 1 and a fixture robot 2 located on one side of the abrasive belt polishing device. The abrasive belt polishing device 1 includes an organic base 11, a head support frame 12 arranged on the base, and four polishing heads 3 arranged on the head support frame, wherein: the main part of the head support frame 12 is in the shape of a "mouth" Frame structure, the upper beam and the lower beam of the frame structure are respectively symmetrically provided with two polishing heads, and the above four polishing heads 3 also form a "mouth"-shaped arrangement structure; each polishing head 3 is provided with a hollow structure The headstock 36, the front side of the headstock 36 is provided with an abrasive belt drive assembly 31, an abrasive belt tensioning assembly 32, a spring liner assembly 33 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More