

End effector used for demounting nut of high-tension transmission line and robot
A technology of high-voltage transmission lines and end effectors, applied in the field of robotics, can solve the problems of less research on online operation tools, and achieve the effects of strong functional scalability, convenient operation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
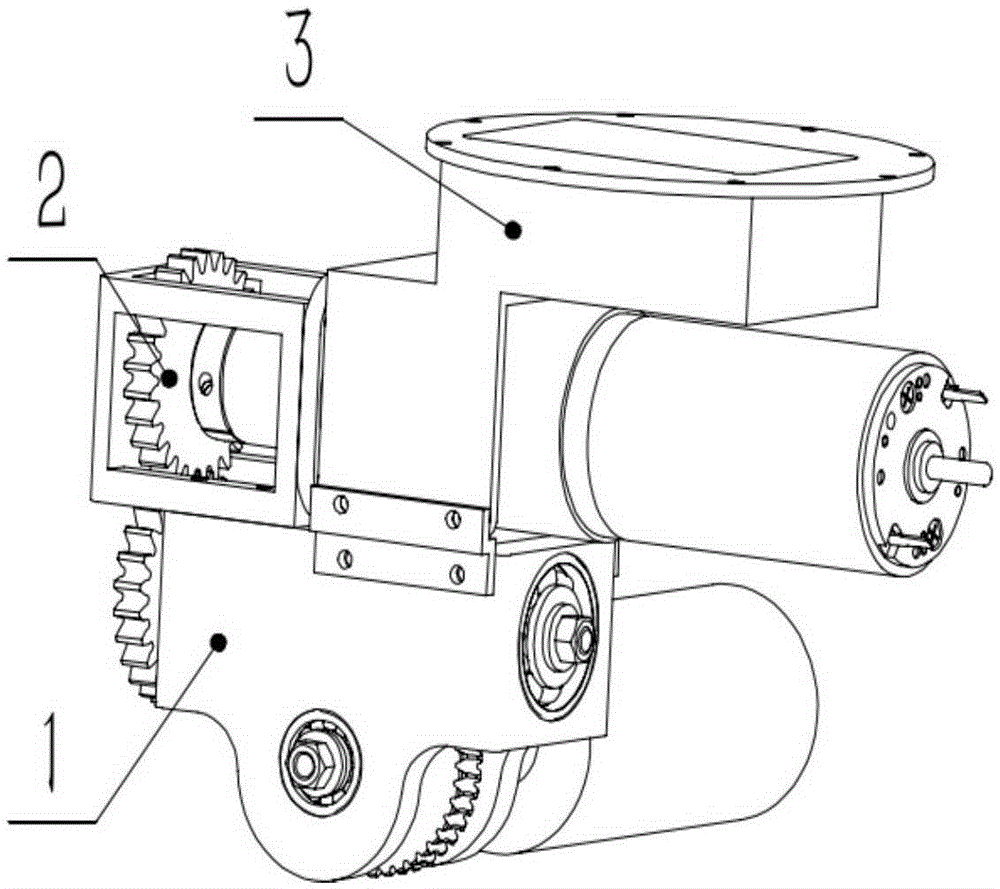
[0027] First, use figure 1 The overall structure of the end effector for dismounting and assembling the nut of the high-voltage transmission line of the present invention will be described. in addition, figure 1 The shown end effector and the robot are operated by a predetermined control device not shown.
[0028] Such as figure 1 As shown, the end effector used to disassemble and assemble the nut of the high-voltage transmission line includes the drive module 1, the execution module 2 and the adapter 3. Wherein, the head end of the adapter 3 is connected with the execution module 2, and the end of the adapter 3 is used for connecting the robot manipulation arm.
[0029] The function of the adapter 3 is to connect the execution module 2 and the robot operating arm, so that the robot controls the operating arm, and further controls the end effector to disa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More