A Minimally Invasive Fracture Reduction Robot
A robot and miniature technology, applied in the field of medical robots, can solve the problems of secondary injury, poor ability of flexible obstacle avoidance, insufficient movement, etc., to achieve the effect of strong obstacle avoidance, reduced dosage and pain relief
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. Please refer to the accompanying drawings and describe the present invention in detail below in conjunction with the embodiments. The accompanying drawings are only for reference and description, and do not constitute a limitation to the patent protection scope of the present invention.
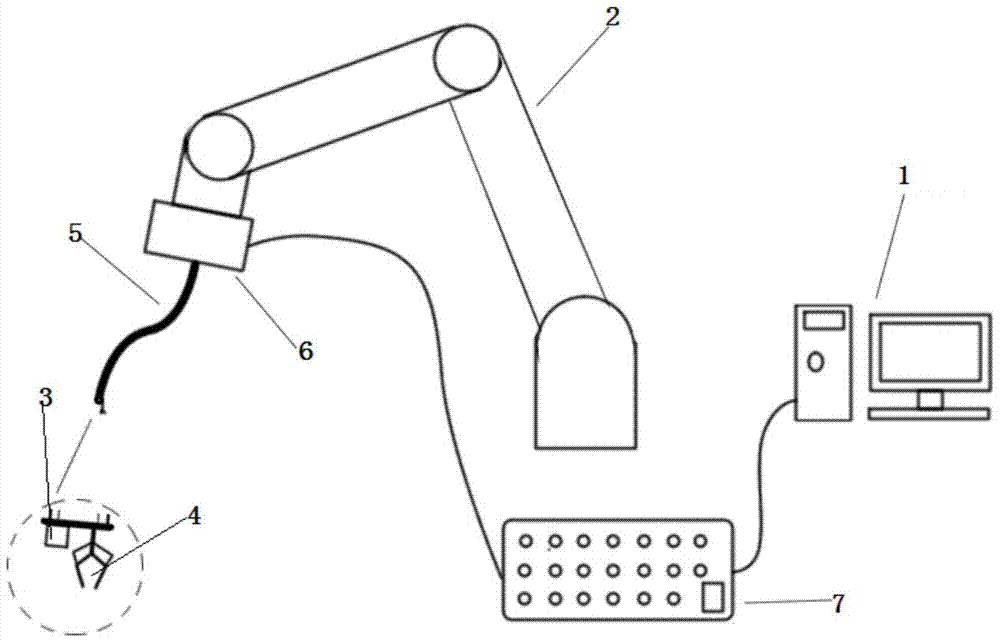
[0022] In order to solve the shortcomings of current fracture reduction robots, such as inflexible movement, poor obstacle avoidance ability, easy friction with tissues and organs in the body, causing secondary injuries, etc., the present invention provides a minimally invasive fracture reduction robot.
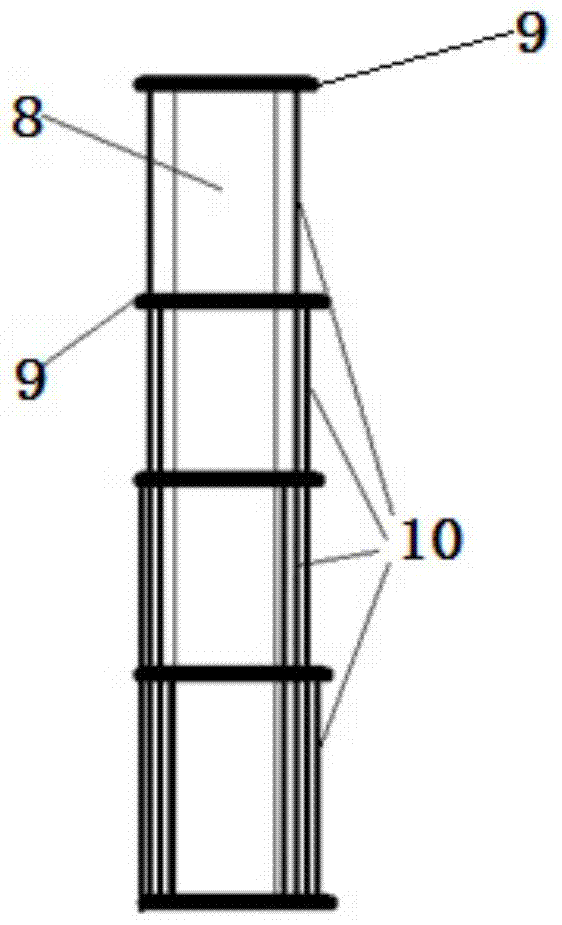
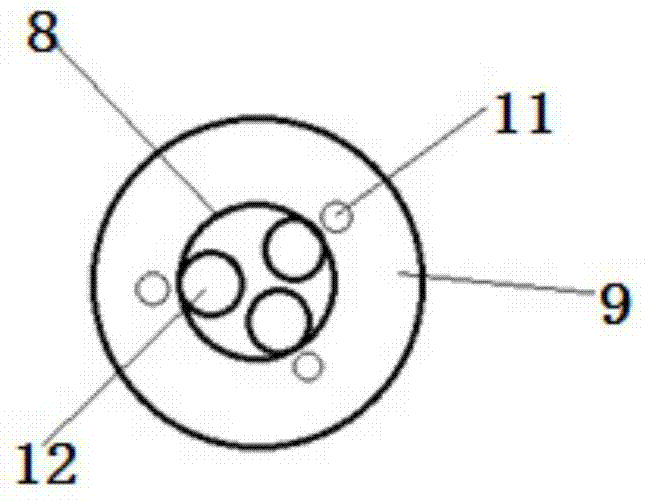
[0023] The fracture reduction robot includes: a computer, a discrete-joint mechanical arm, a continuum flexible joint, a microsurgical operating device, and an image acquisition feedback system; wherein, the image acquisiti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More