Endoscope-holding robot for minimally invasive abdominal operation
A minimally invasive surgery and robot technology, applied in the field of medical robots, can solve problems such as difficult control and complex structure, and achieve the effects of flexible manipulation, large movement space and good movement coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
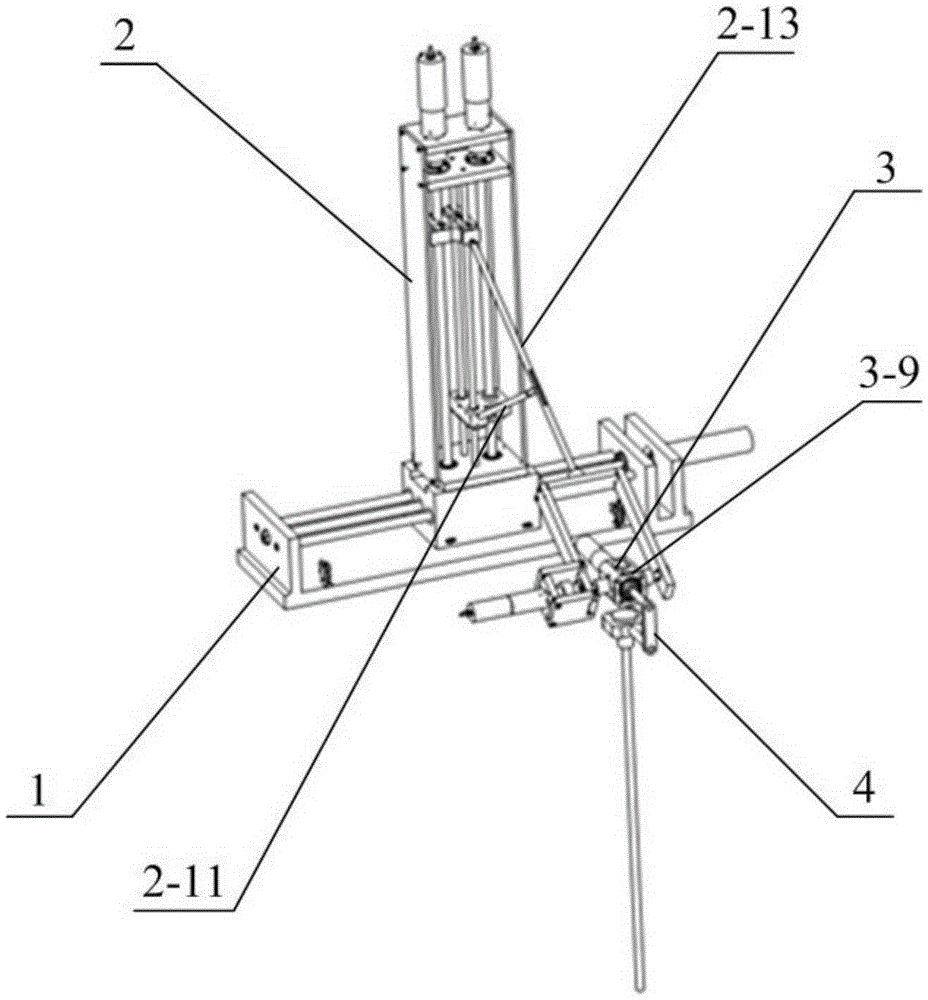
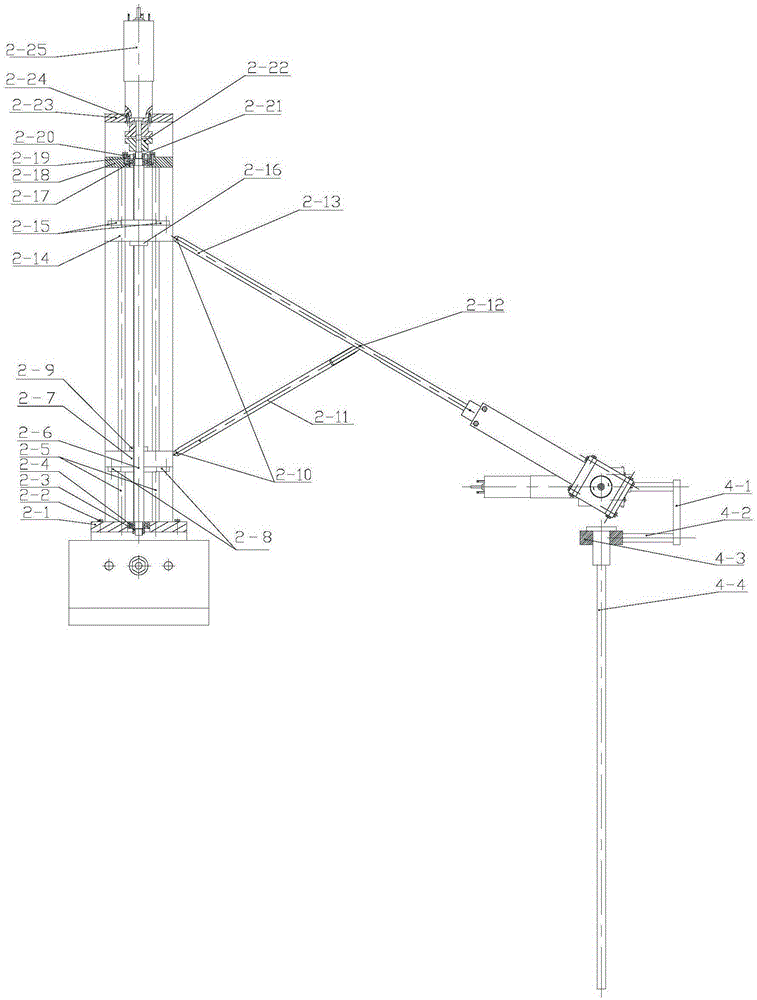
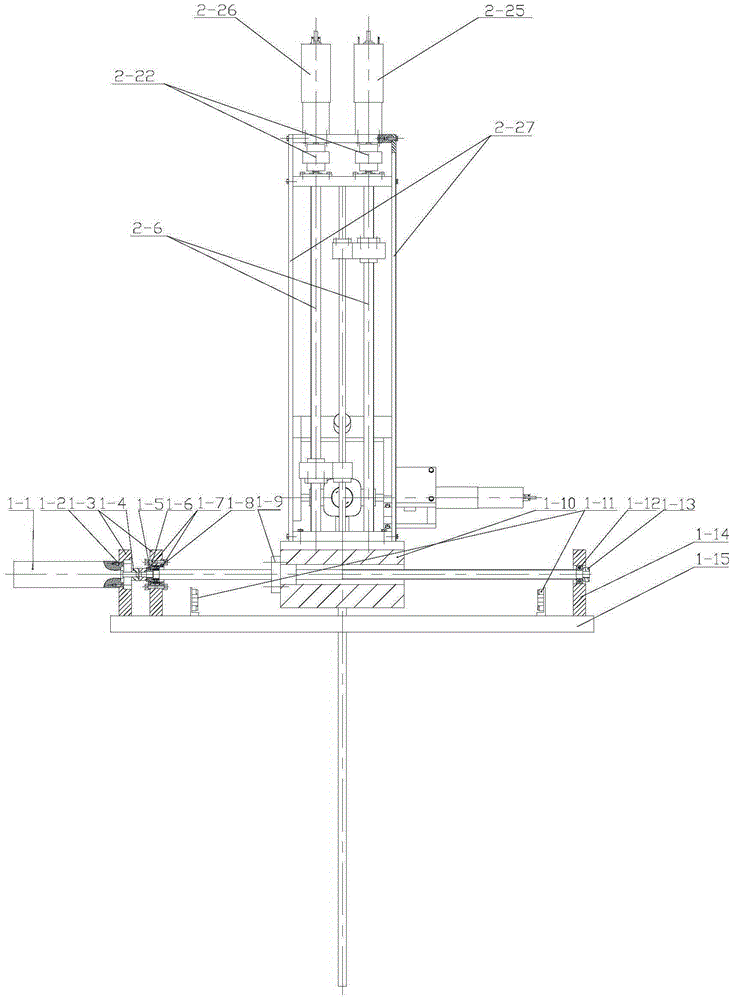
[0064] Such as figure 2 As shown, the scope-holding robot for minimally invasive abdominal surgery of the present invention is composed of a horizontal movement mechanism, a vertical movement mechanism, an endoscope posture adjustment mechanism and an endoscope holder. Among them, the horizontal movement mechanism is a series degree of freedom of the robot, which realizes the horizontal movement of the whole mechanism, and the vertical mechanism is two parallel degrees of freedom of the robot, which realizes the lifting and left-right movement of the endoscope holder. The lower support plate 2-1 The horizontal movement of the vertical mechanism is realized by being fixed on the horizontal slider 1-10 by the screw 2-2.
[0065] One end of the first connecting rod 2-13 is fixed on the first slide block 2-14 of the vertical movement mechanism, the other end is connected with the mounting bracket of the endoscope attitude adjustment mechanism, and the middle is connected with one...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More