

A kind of master-slave robot master hand operating wrist
A robot master and hand operation technology, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve problems such as the inability to achieve the balance of force of the manipulator, lack of force feeling, application limitations, etc. The effect of reducing the level of fatigue
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
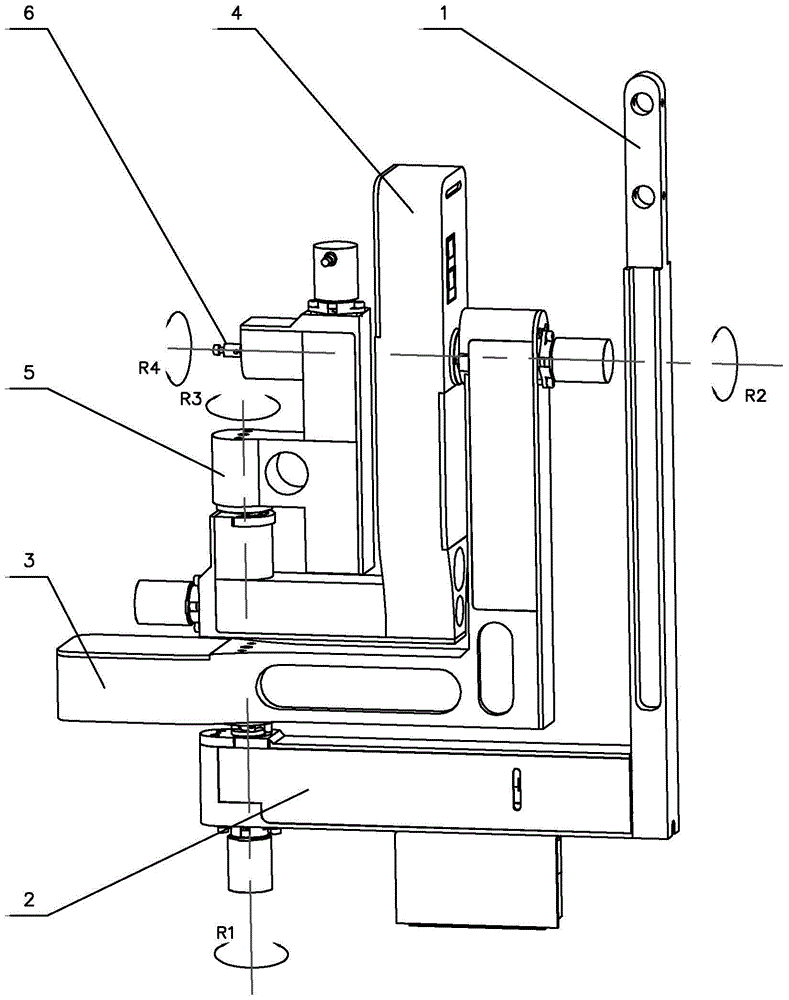
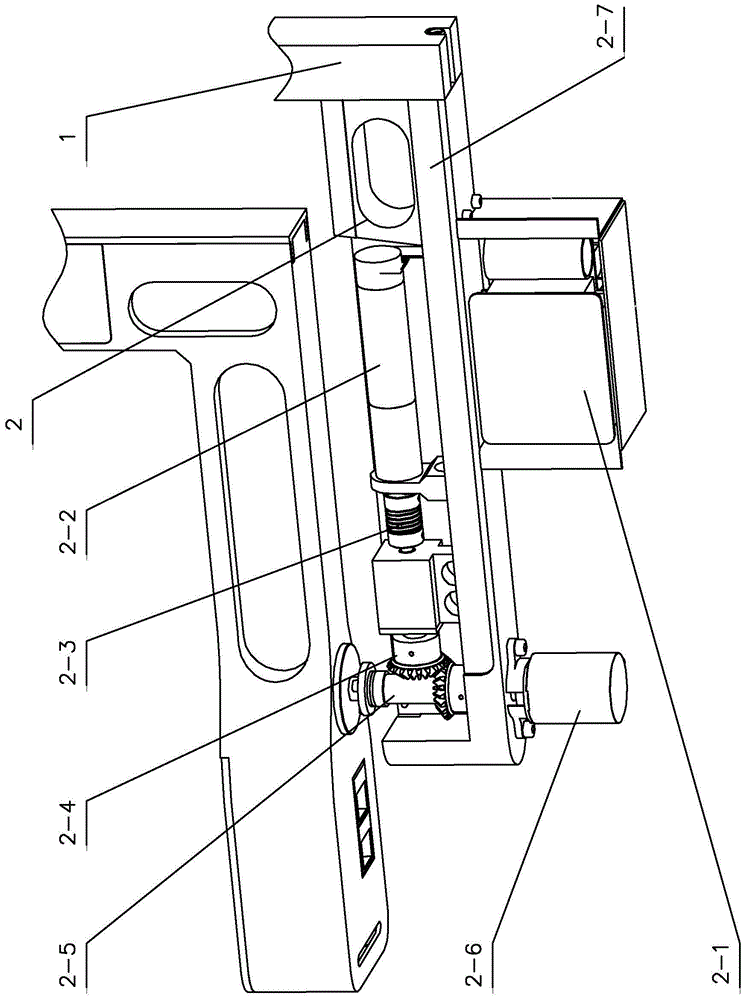
[0015] Specific implementation mode one: combine Figure 1-Figure 4 Describe this embodiment, a master-slave robot master hand operation wrist, which includes an arm connector 1, a first wrist joint assembly 2, a second wrist joint assembly 3, a third wrist joint assembly 4, and a fourth wrist joint assembly 5 And the clamping mechanism connector 6, the first wrist joint assembly 2 includes a first driver 2-1, a first motor 2-2, a first coupling 2-3, a first shaft 2-5, a first absolute angle Encoder 2-6, first housing 2-7 and two first bevel gears 2-4; arm connector 1 is a bar-shaped frame, the first housing 2-7 is a rectangular hollow housing, and the first shell One end of the body 2-7 is fixedly connected to the bottom end of the arm connector 1, and the centerline of the first housing 2-7 along the length direction is perpendicular to the centerline of the arm connector 1 along the length direction, and the first driver 2- 1 is fixedly installed on the side wall of the fi...
specific Embodiment approach 2
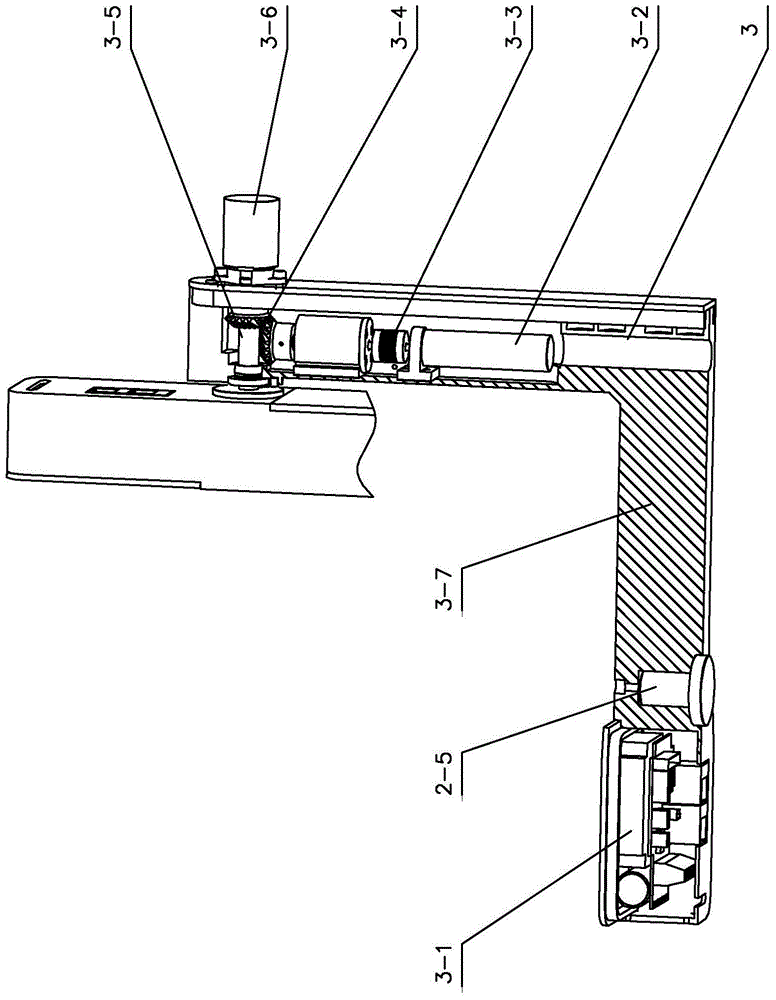
[0016] Specific implementation mode two: combination Figure 1-Figure 3 Describe this embodiment, a master-slave robot master hand operates the wrist, and the second wrist joint assembly 3 includes a second driver 3-1, a second motor 3-2, a second coupling 3-3, a second Shaft 3-5, second absolute angle encoder 3-6, second housing 3-7 and two second bevel gears 3-4; second housing 3-7 is an 'L' shaped housing, the second The second driver 3-1 is installed on the second housing 3-7 horizontal plate, the top of the first shaft 2-5 is fixedly installed on the second housing 3-7 horizontal plate, the output end of the second motor 3-2 rotating shaft Fixedly connected with the bottom end of the second shaft coupling 3-3, a second bevel gear 3-4 is fixedly sleeved on the top of the second shaft coupling 3-3, and another second bevel gear 3-4 is fixedly sleeved on On the second shaft 3-5, the second absolute angle encoder 3-6 is fixedly installed on the vertical plate of the second h...
specific Embodiment approach 3
[0017] Specific implementation mode three: combination Figure 1-Figure 4Describe this embodiment, a master-slave robot master hand operates the wrist, and the third wrist joint assembly 4 includes a third driver 4-1, a third motor 4-2, a third coupling 4-3, a third Shaft 4-5, the third absolute angle encoder 4-6, the third housing 4-7 and two third bevel gears 4-4; the third housing 4-7 is an 'L' shaped housing, the third housing 4-7 The two shafts 3-5 are fixedly installed on the vertical plate of the third housing 4-7, the third driver 4-1 is fixedly installed on the vertical plate of the third housing 4-7, and the third motor 4-2 rotating shaft The output end of the third shaft coupling 4-3 is fixed, a third bevel gear 4-4 is fixedly fitted on the other end of the third shaft coupling 4-3, and the third absolute angle encoder 4- 6 is fixedly installed on the horizontal plate of the third housing 4-7, and the rotating shaft of the third absolute angle encoder 4-6 is fixedl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More