

Structural dimension parameter adjustable Mecanum wheel type mobile robot
A mobile robot, structural size technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of small working space and small range of motion, and achieve the effect of increasing applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
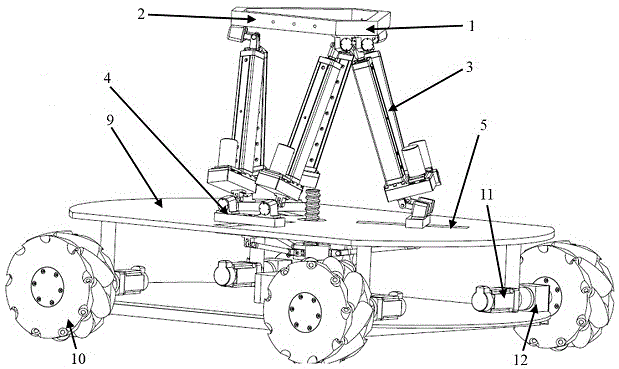
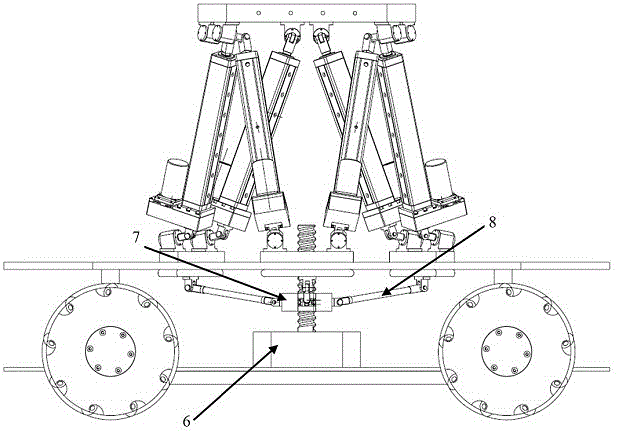
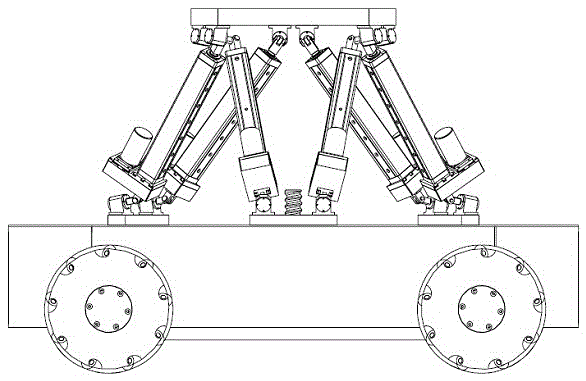
[0023] Such as figure 1 with figure 2 As shown, a Mecanum wheeled mobile robot with adjustable structural size parameters is composed of a Stewart platform with adjustable structural size parameters and a Mecanum wheel mobile platform. The Stewart platform includes a Stewart dynamic platform and a Stewart static platform. , connecting rod mechanism, specifically as follows:
[0024] 1) The Stewart moving platform includes three moving platform fixing blocks 1 and three variable length rods 2; each moving platform fixing block 1 and each variable length rod 2 are alternately fixedly connected from end to end to form a closed ring structure;
[0025] 2) The Stewart static platform includes six linear actuators 3, three static platform feet 4 and three slide rails 5; one end of the six linear actuators 3 is connected to the fixed block 1 of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More