A space-based observation simulation system and method targeted at satellite targets and fixed star targets
A target and satellite technology, applied in the field of space-based observation and simulation systems, can solve the problems of less research and simulation, and achieve the effect of improving fidelity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The specific implementation manner of the present invention will be described below in conjunction with the technical scheme and the accompanying drawings.
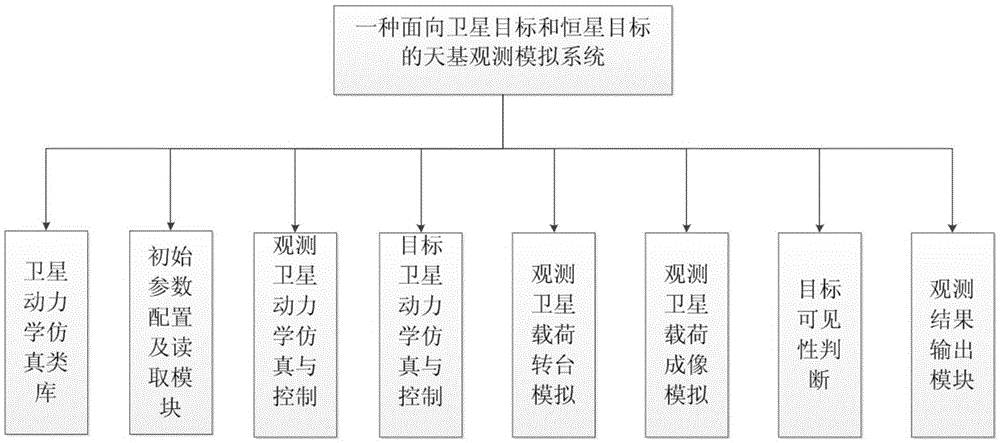
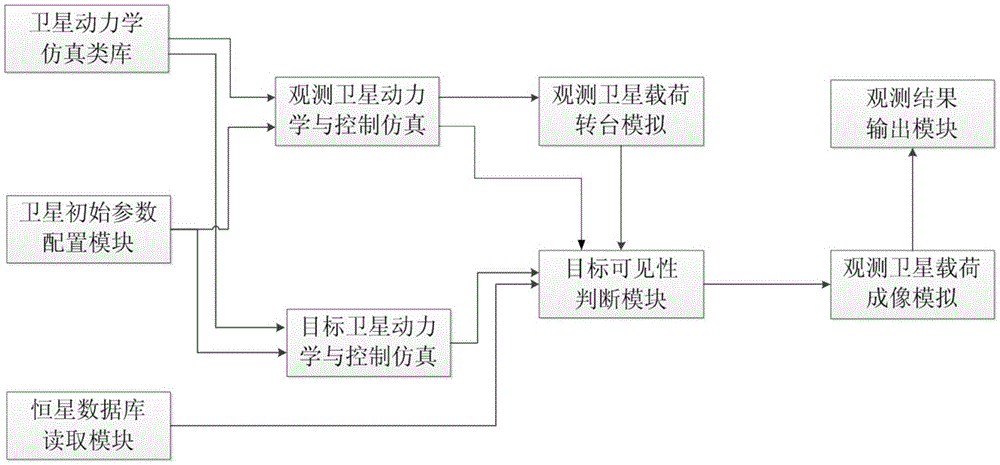
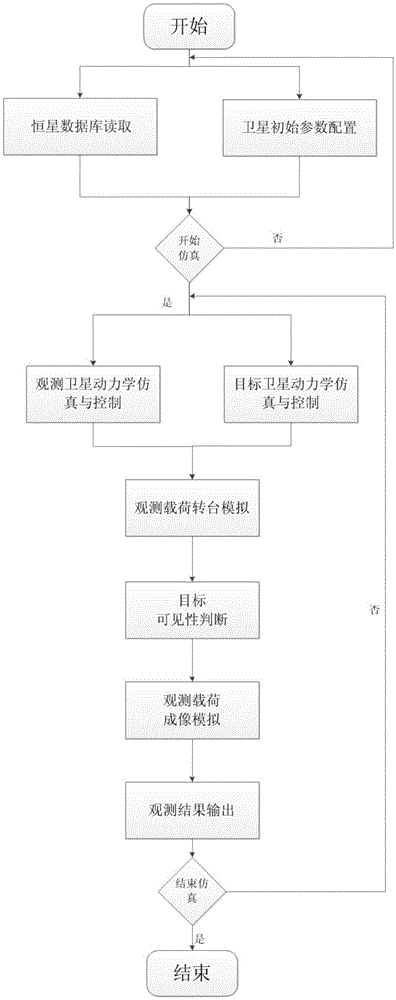
[0046] Such as figure 1 , 2 As shown, the present invention provides a space-based observation simulation system for satellite targets and stellar targets. It mainly includes star database reading module, satellite dynamics simulation class library, satellite initial parameter configuration module, observation satellite dynamics simulation and control, target satellite dynamics simulation and control, observation satellite load turntable simulation module, target visibility judgment module, Observation satellite load imaging simulation, observation result simulation output module, the data communication between modules is mainly realized through the form of internal interface, the operation process of the whole system is as follows: image 3 shown.
[0047] The data transformation between different coordinate sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More