Nuclear power station rescue and operation robot
A technology for robots and nuclear power plants, applied in the field of robots, it can solve the problems of not being able to completely replace manpower, having few functions, and not being able to withstand high temperatures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
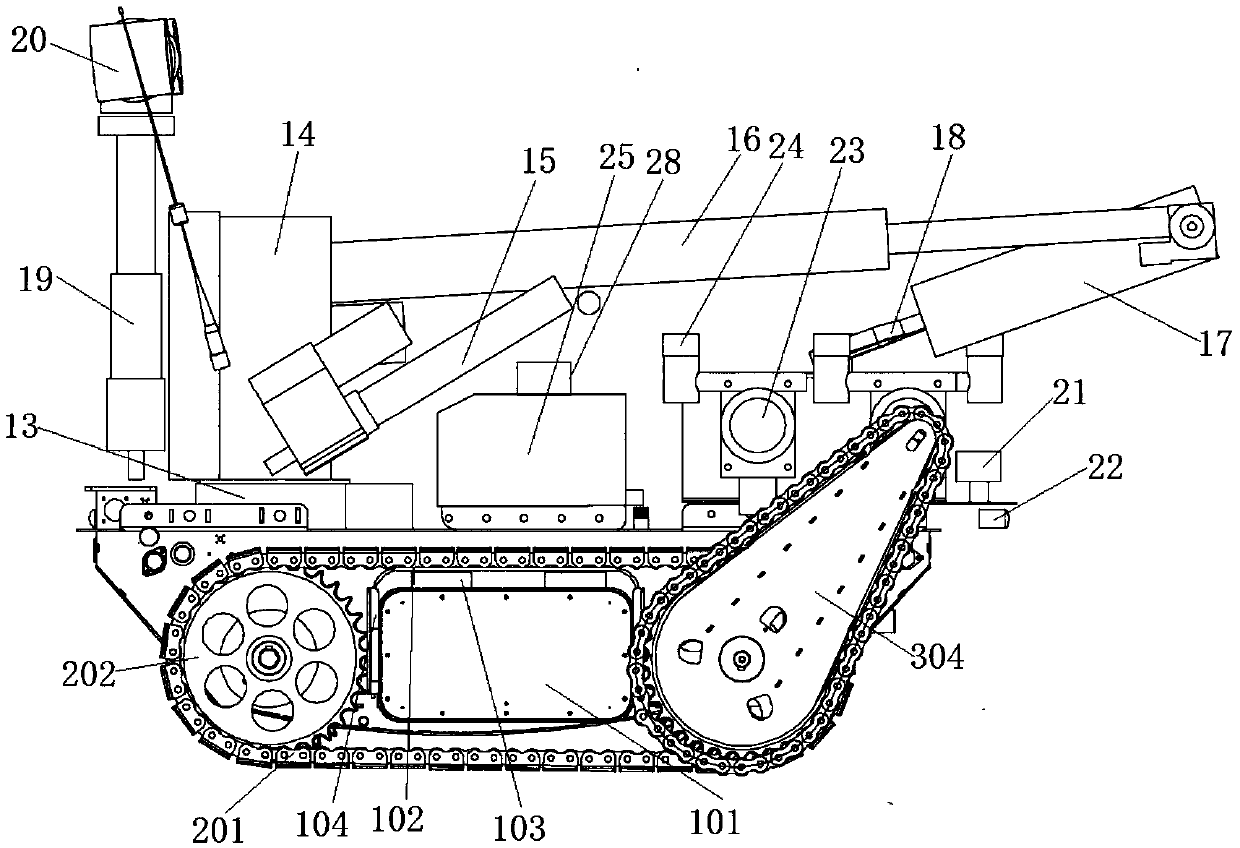
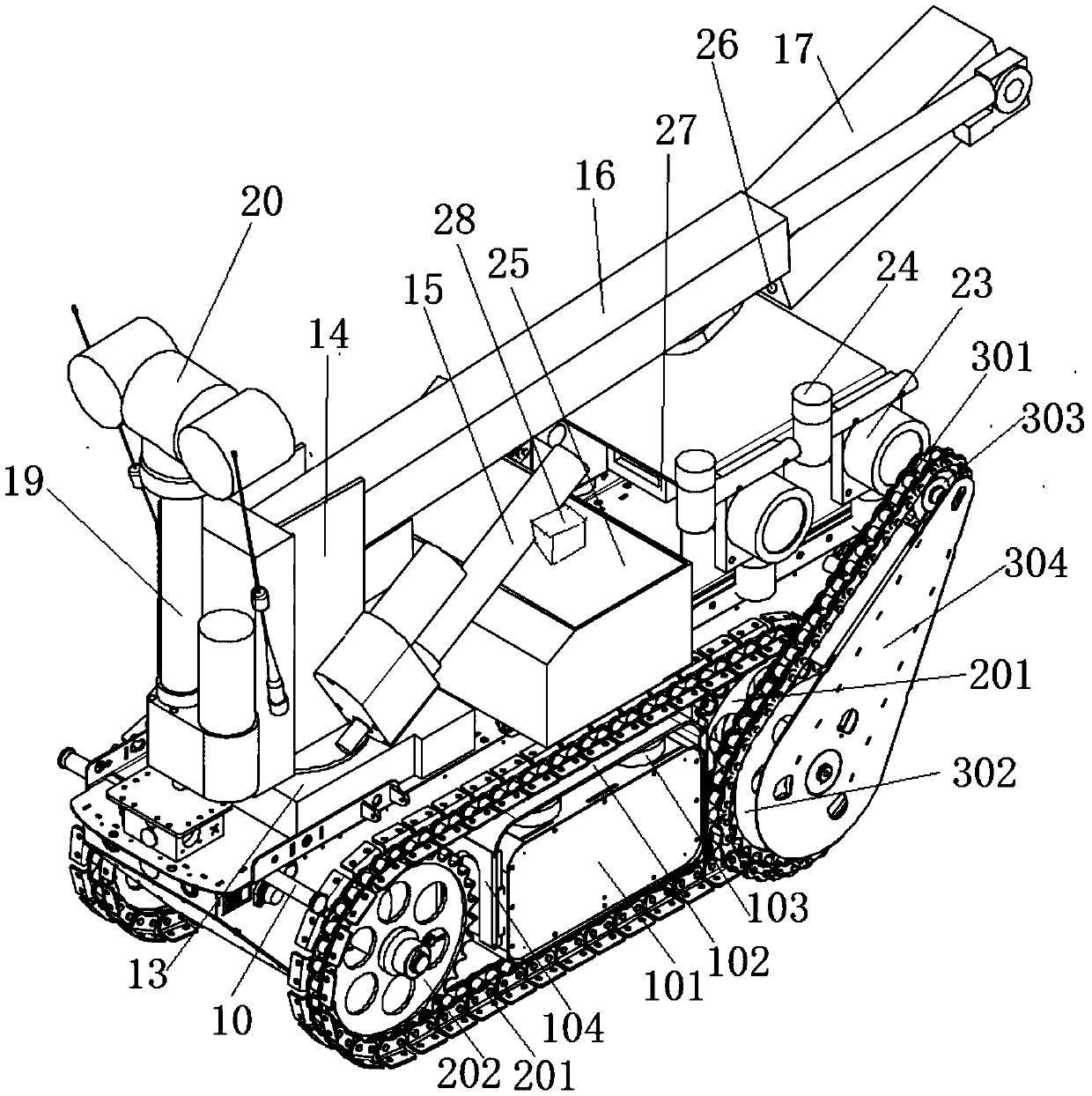
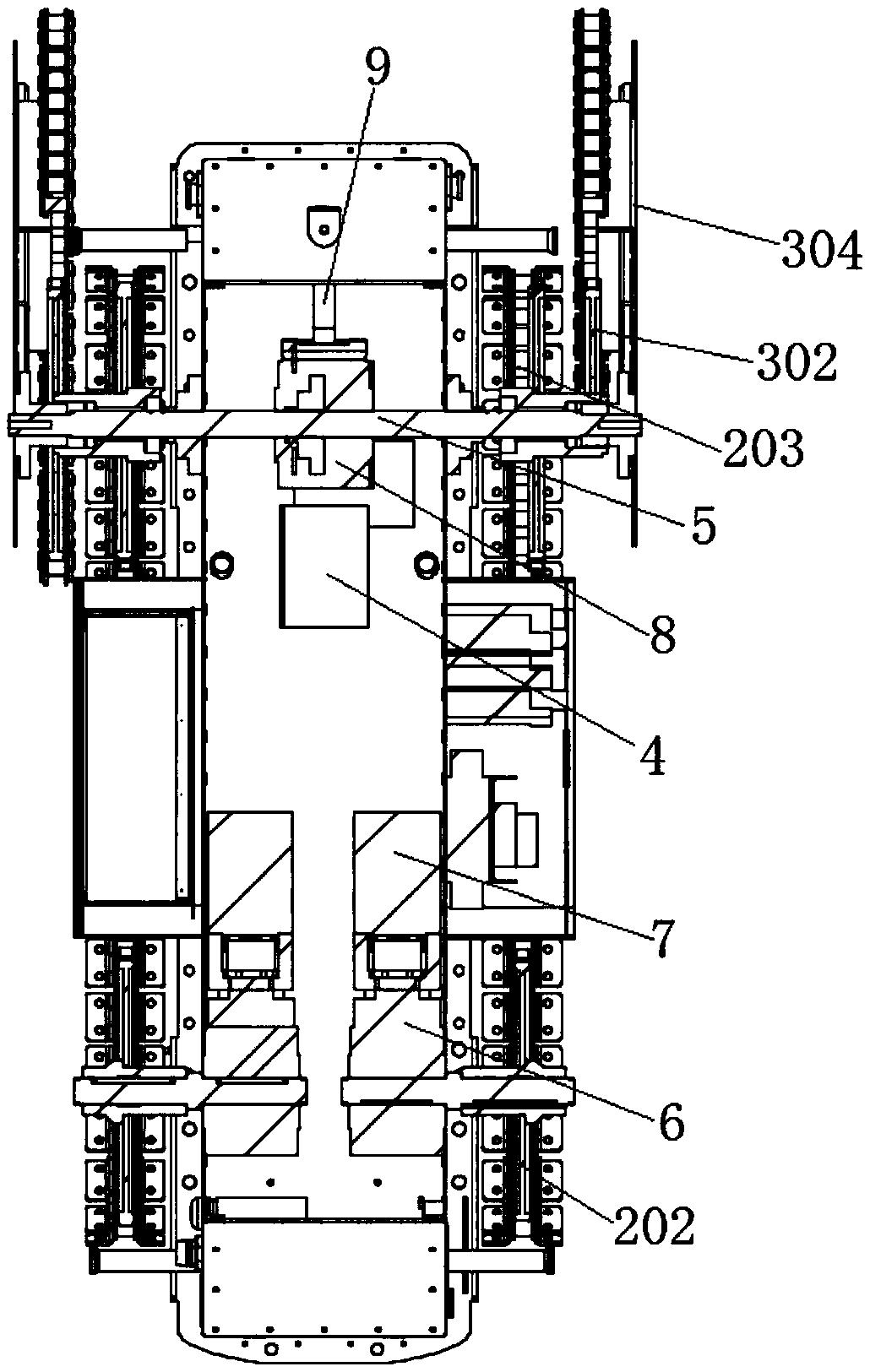
[0037] combine figure 1 , figure 2 and image 3 , a nuclear power plant rescue and operation robot in this embodiment includes a wheel-track robot platform, including a chassis cabin 1 and crawler belts located on the left and right sides of the chassis cabin 1, and the front and rear of the chassis cabin 1 in this embodiment Both sides are inwardly inclined slopes, which improve the obstacle-surmounting ability of the robot platform; in order to facilitate the handling of the chassis cabin body 1, the front and rear positions of the left and right side panels of the chassis cabin body 1 are provided with lifting handles 10, and in order to facilitate carrying For fuses, emergency medicines and emergency equipment, the lifting handle 10 is a hollow tube, and the opening of the hollow tube is threadedly connected with an end cover; the crawler running mechanism includes a chassis anti-corrosion metal crawler 201, a chassis driving wheel 202 and a rotation connection with the ...
Embodiment 2
[0042] The basic structure of a nuclear power plant rescue and operation robot in this embodiment is the same as in Embodiment 1, except that the monitor 20 is an infrared thermal imager, which can detect pipeline leaks, fire points or people to be rescued through subtle temperature changes.
Embodiment 3
[0044] The basic structure of a nuclear power plant rescue and operation robot in this embodiment is the same as that in Embodiment 1, except that the monitor 20 is a pan-tilt camera, which can clearly understand the situation on site.
[0045] The nuclear power plant rescue and operation robot of the present invention has strong obstacle surviving ability, strong performance in adapting to high and low temperature environment and strong acid and strong alkali environment, good climbing and obstacle surviving ability, and has secondary survival ability in high temperature, explosion and strong corrosion environment , it can be detected by nuclear radiation detectors to confirm the environmental status of the site, it can detect high temperature or leakage points and the victims of the disaster, it can use the temperature sensor 22 and gas detector 23 to detect whether there is high temperature, poisonous and explosive possibility in the surrounding, and use the rescue manipulato...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap