

Inertial navigation/Doppler radar combination-based vehicle positioning and orientation method
A Doppler radar, positioning and orientation technology, applied in the field of vehicle positioning and orientation based on inertial navigation/Doppler radar combination, can solve problems such as low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
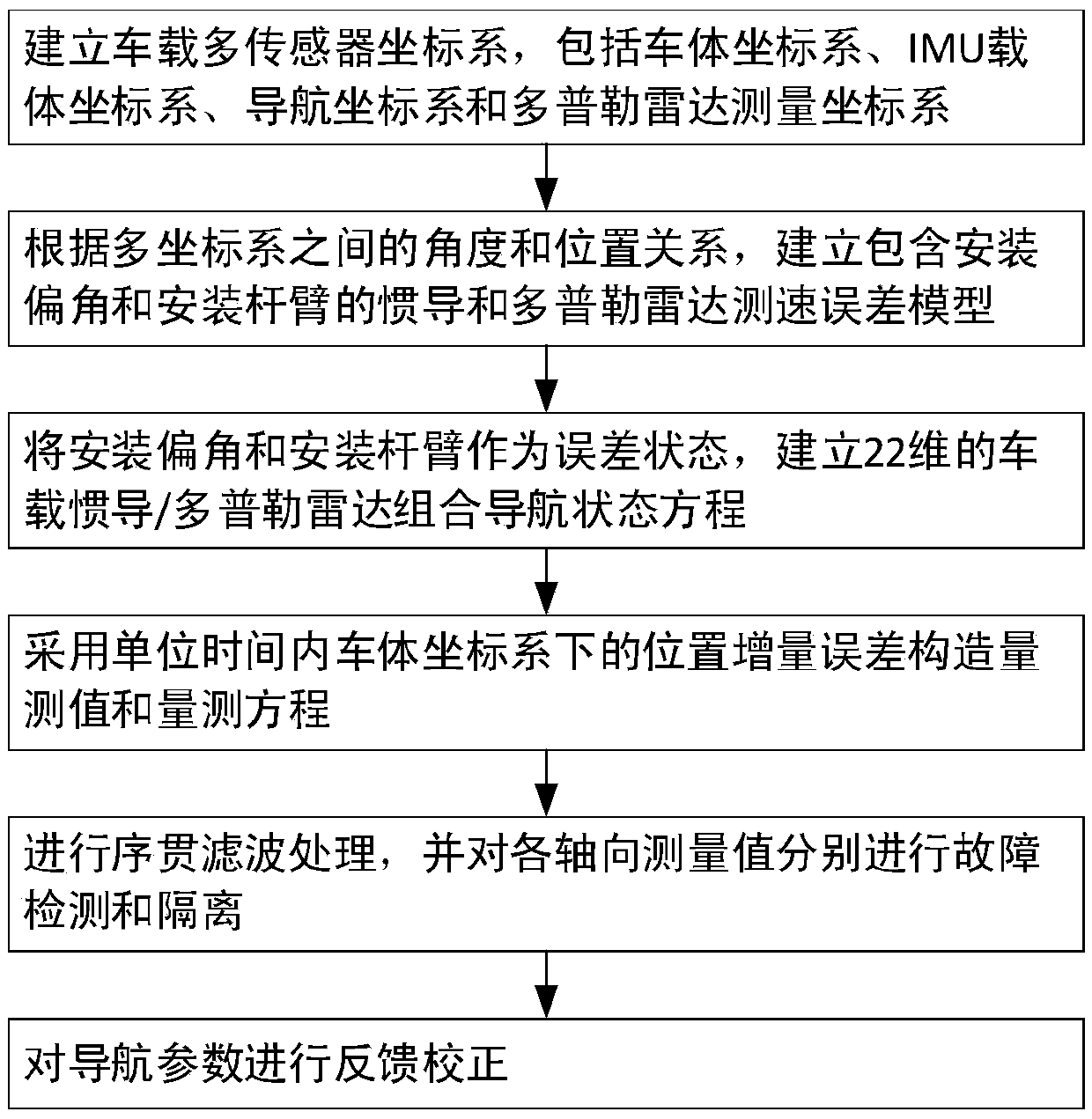
[0081] refer to Figure 1-4 . The specific steps of the vehicle positioning and orientation method based on inertial navigation / Doppler radar combination of the present invention are as follows:
[0082] 1. Establish a coordinate system.
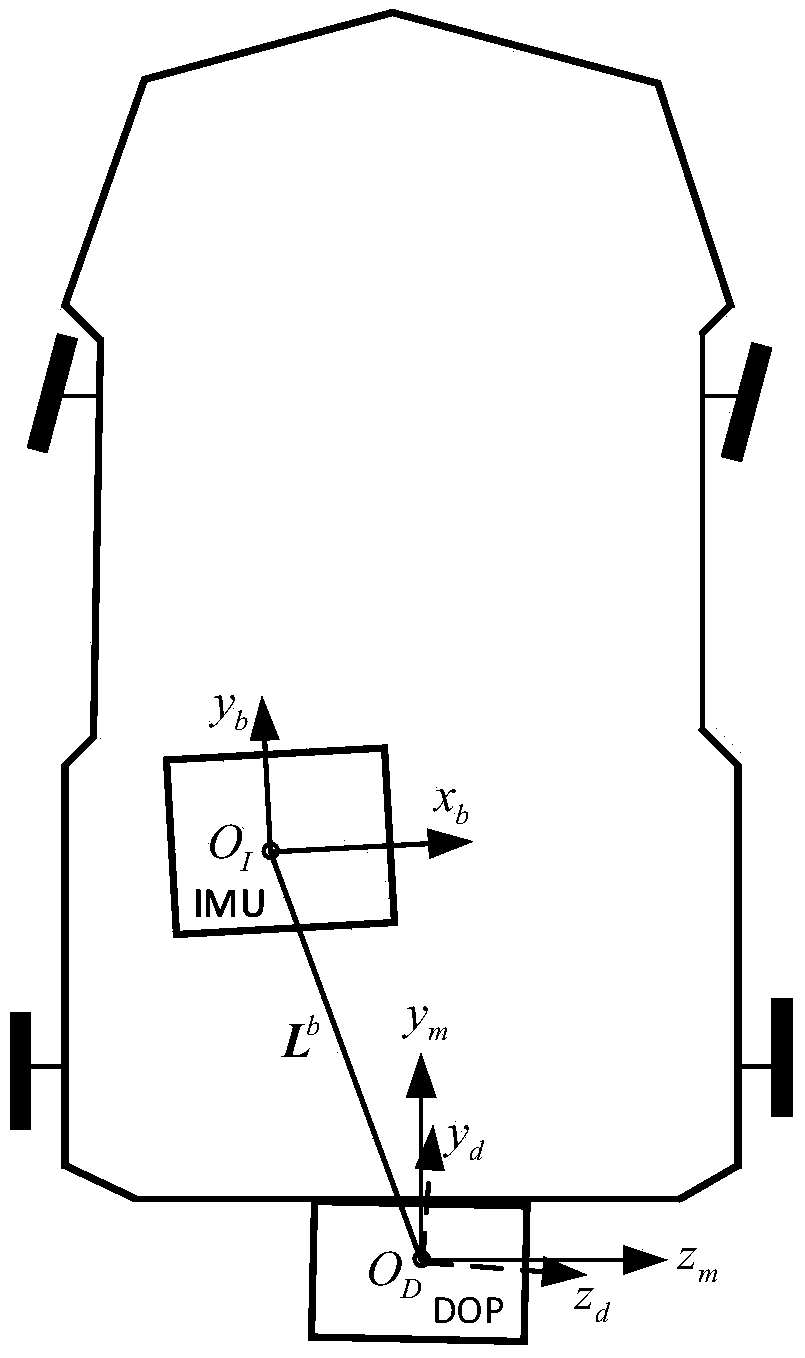
[0083] Define the IMU carrier coordinate system as b, and the origin is located at the sensitive center O inside the IMU I , the coordinate axis pointing is determined according to the right-front-up direction.
[0084] Define the navigation coordinate system of the inertial navigation solution as n, and the origin is located at the sensitive center O inside the IMU I The geographic location of the point, and the coordinate axis is defined by the east-north-sky direction of the local geographic location.
[0085] Define the Doppler radar measurement coordinate system as d, and the origin is located at the sensitive center O of the Doppler radar D , the coordinate axis pointing is determined according to the right-front-up direction.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More