

AUV inversion docking control method
A control method and inversion technology, applied in the direction of non-electric variable control, height or depth control, control/regulation system, etc., can solve problems such as large impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
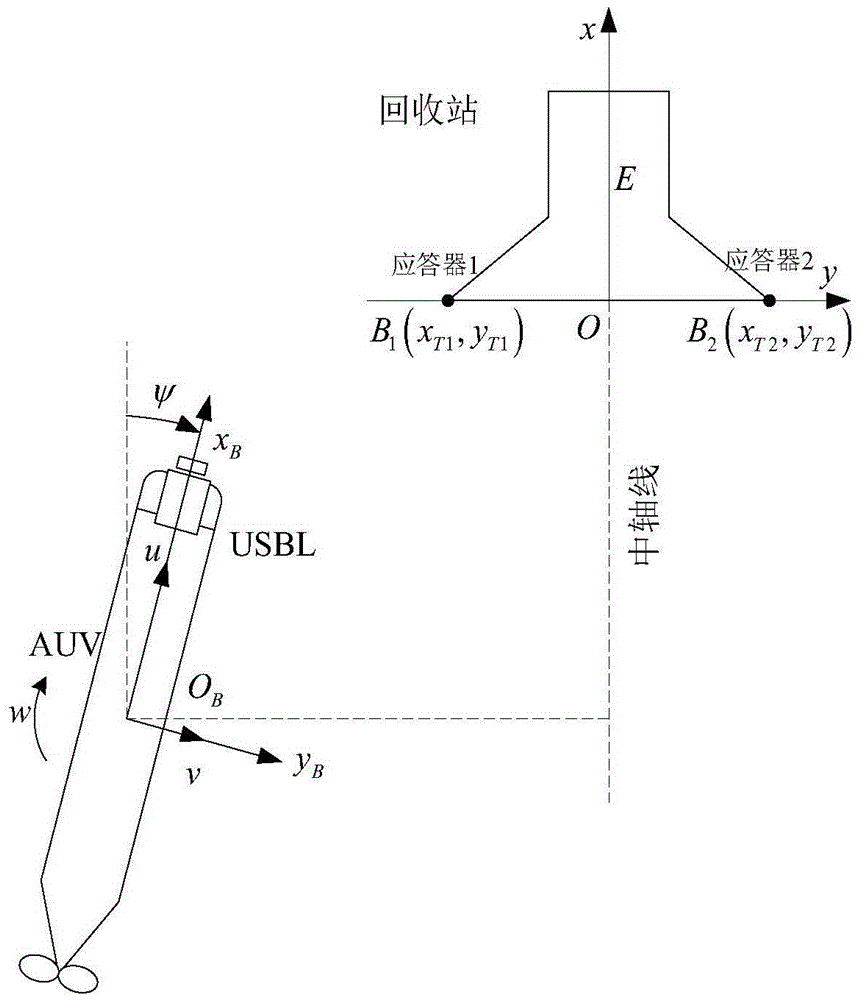
[0049] Such as figure 1 As shown, it is characterized in that a USBL transceiver is installed on the head of the AUV, and two USBL transponders B are installed on both sides of the recycle bin 1 and B 2 .
[0050] Implementation example:
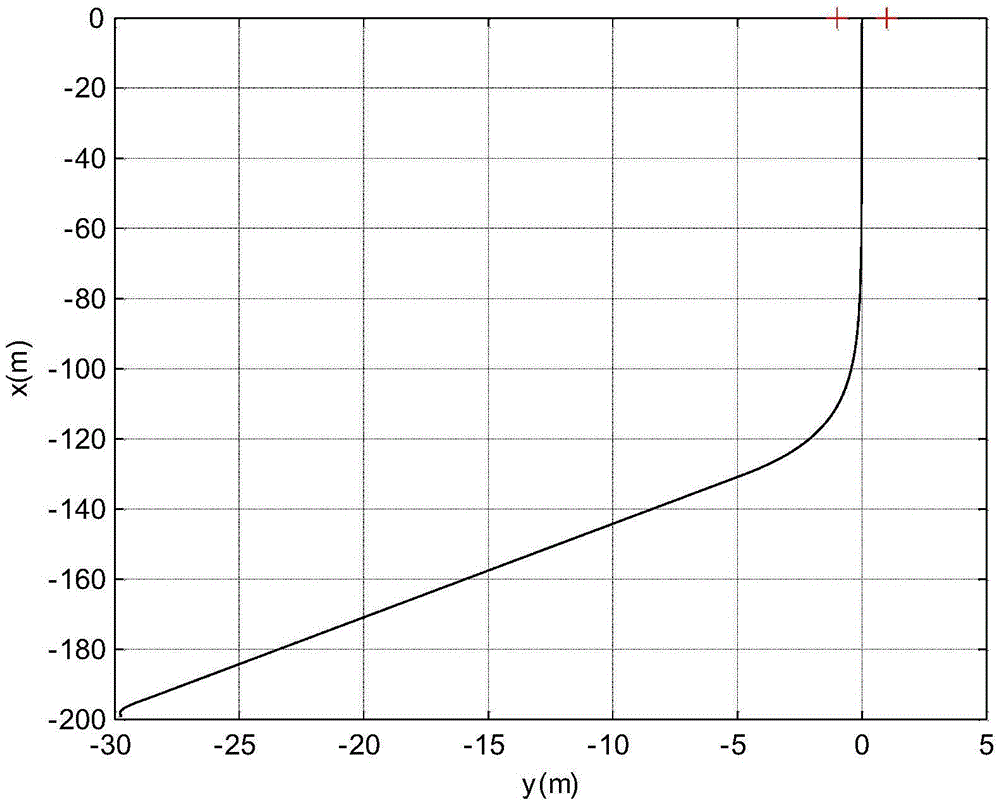
[0051] Step 1: AUV starts back-to-dock guidance from the initial point (-200,-30) with an initial heading angle of 30° in the recovery coordinate system xoy. The initial forward velocity and lateral velocity are 0.8m / s and 0m / s, respectively, and the angular velocity is 0m / s.
[0052] Step 2: Transponder B 1 and B 2 The coordinates in the global coordinate system are (0,-1) and (0,1).
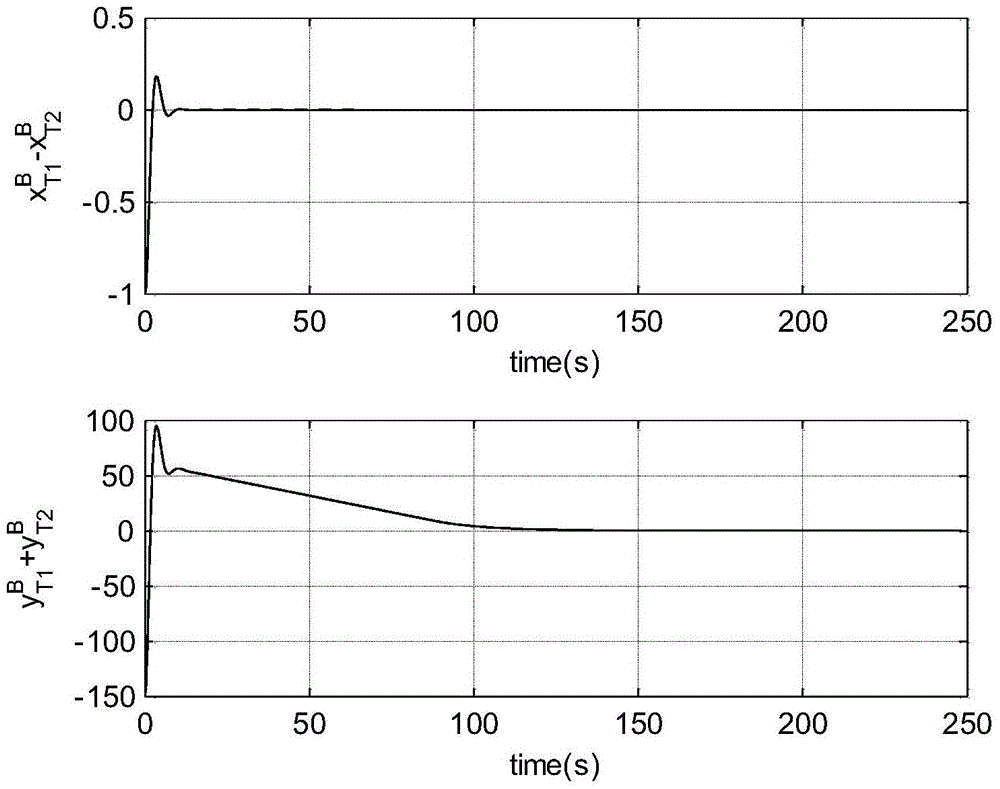
[0053] Step 3: Derivation of the AUV transponder position measurement equation with respect to time:
[0054] x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More