

Device and method for simulating space mechanical arm to capture ground three-dimensional space microgravity of target satellite
A space manipulator, a technology for simulating space, applied in the simulation device of space navigation conditions, transportation and packaging, space navigation equipment, etc., can solve the problem of not considering the movement of the floating satellite base of the space manipulator and other problems, and achieve reliable verification. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
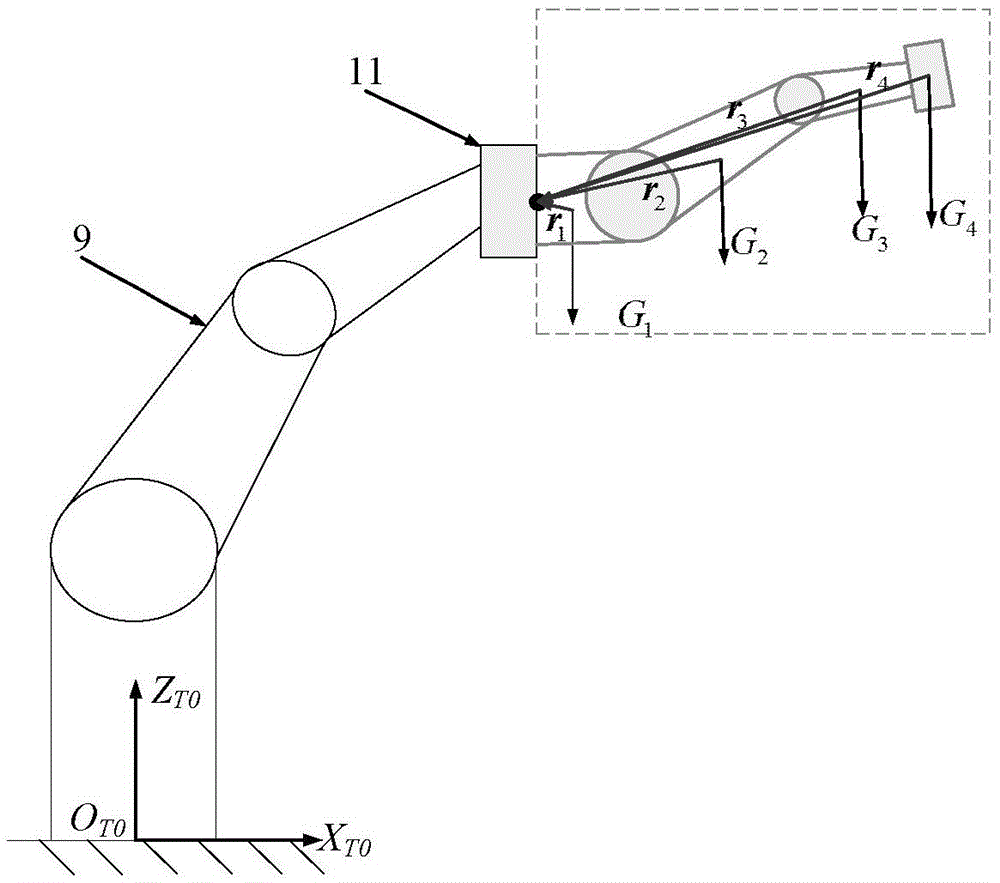
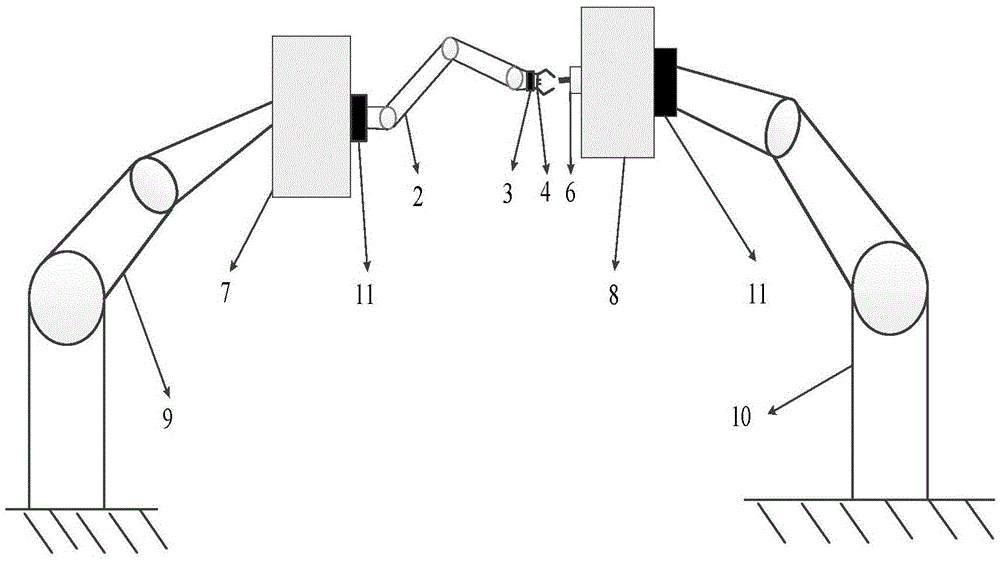
[0059] Specific embodiment one: a kind of ground three-dimensional space microgravity device of simulating a space manipulator to capture target satellite in this embodiment specifically includes industrial manipulator A9, industrial manipulator T10; Space manipulator 2, hand-eye camera 3, capture hand claw 4. The capture interface 6, the service satellite body simulator 7, the target satellite body simulator 8 and the six-dimensional force / torque sensor 11 are composed as follows figure 2 ;
[0060] The effect of this implementation mode:
[0061] This embodiment relates to a space device and method for simulating the three-dimensional microgravity on the ground where a space manipulator captures a target satellite, and belongs to the technical field of space manipulators.
[0062] The three-dimensional space microgravity simulation and verification method on the ground is used for the experiment and test of the three-dimensional space simulation and reproduction of the spa...
specific Embodiment approach 2
[0069] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the end of the industrial mechanical arm A9 is connected to the service satellite body simulator 7, and the service satellite body simulator 7 is connected to the six-dimensional force / moment through the connecting flange. The sensor 11; the six-dimensional force / torque sensor 11 is connected to the space manipulator 2 through the connecting flange; the space manipulator 2 is connected to the hand-eye camera 3 through bolts, and the hand-eye camera 3 captures the gripper 4 through bolt connection;
[0070] The industrial mechanical arm T10 is connected to the six-dimensional force / torque sensor 1 through the connecting flange, and the six-dimensional force / torque sensor 11 is connected to the target satellite body simulator 8 through the connecting flange; the target satellite body simulator 8 is connected to the capture interface 6,
[0071] Wherein, connect capture interface 6 and capture gri...
specific Embodiment approach 3
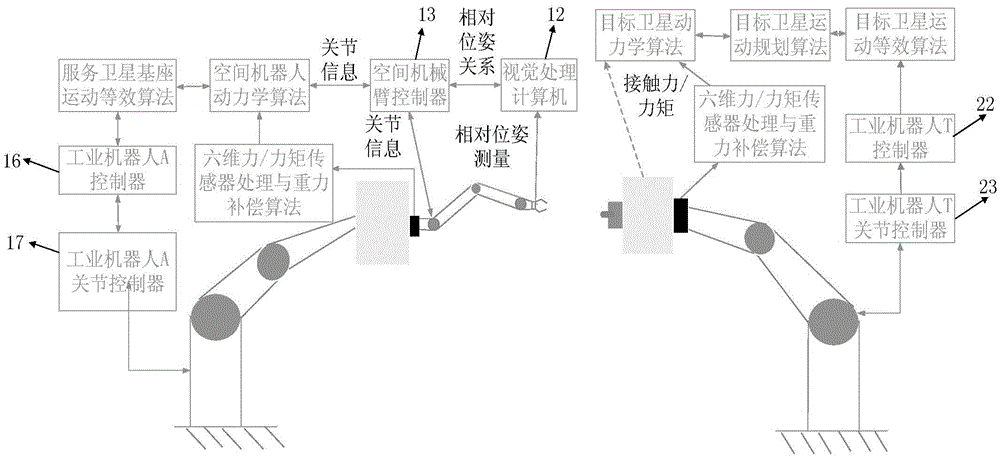
[0074] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: a kind of realization method of the ground three-dimensional space microgravity of simulating space manipulator capturing target satellite specifically comprises the following steps:
[0075] Step 1, simulating the motion of the target satellite; utilizing the kinematics equivalent algorithm to simulate the actual target satellite motion state through the target satellite body simulator 8 through the industrial mechanical arm T10;
[0076] Step 2, collect the visual image of target satellite body simulator 8 relative motion information in step 1 by hand-eye camera 3, determine the attitude of target satellite body simulator 8 relative to the position of hand-eye camera 3 and satellite body simulator 8 according to the visual image ;
[0077] Step 3. Transfer the relative position and attitude determined in step 2 to the space manipulator 2 controller, and the space m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More