

Flexible Adaptive Underactuated Robot Gripper
A robot hand and self-adaptive technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the unrealistic problems of designing and manufacturing universal robots, and achieve the effect of compact structure, exquisite structure and large torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following will be further described in detail in conjunction with the accompanying drawings, but does not constitute any limitation to the . Similar component numbers in the accompanying drawings represent similar components. As above, a flexible adaptive underactuated robot gripper is provided, which can be used as an end effector for industrial robots and the like to stably grasp parts of different shapes.
[0028] The structural composition is described in detail below.
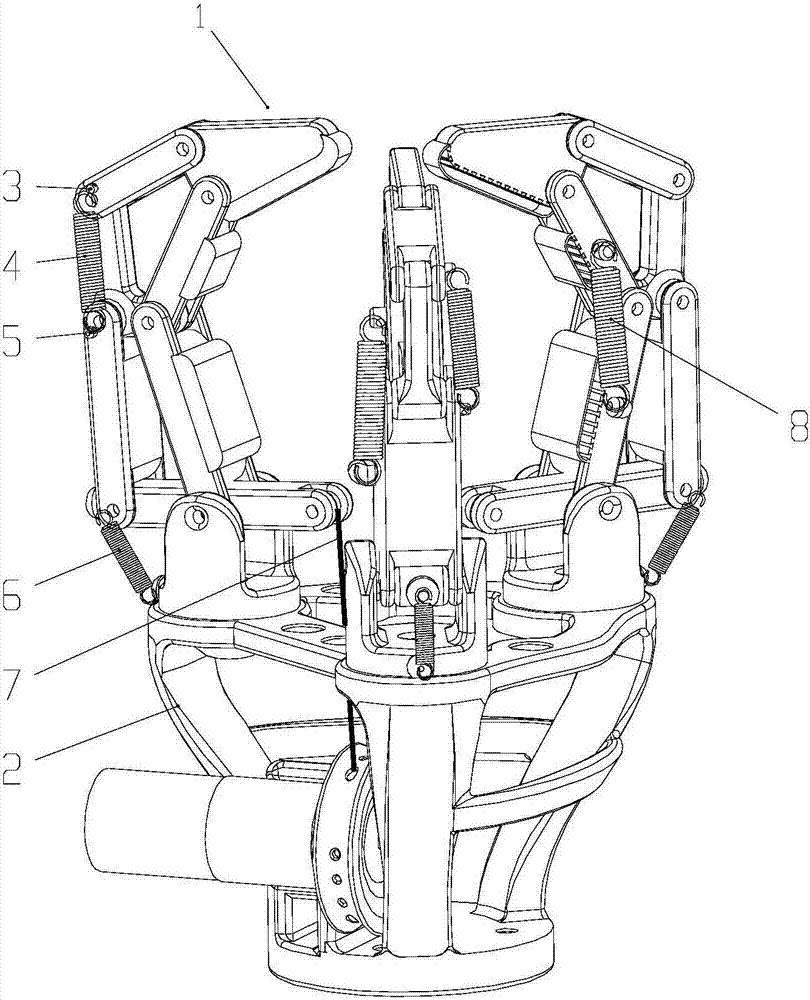
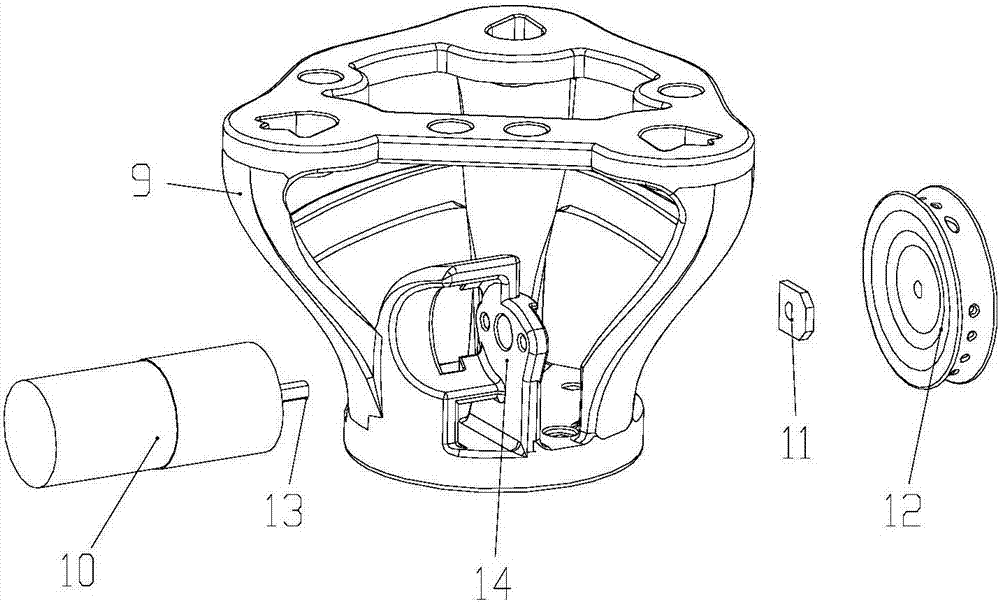
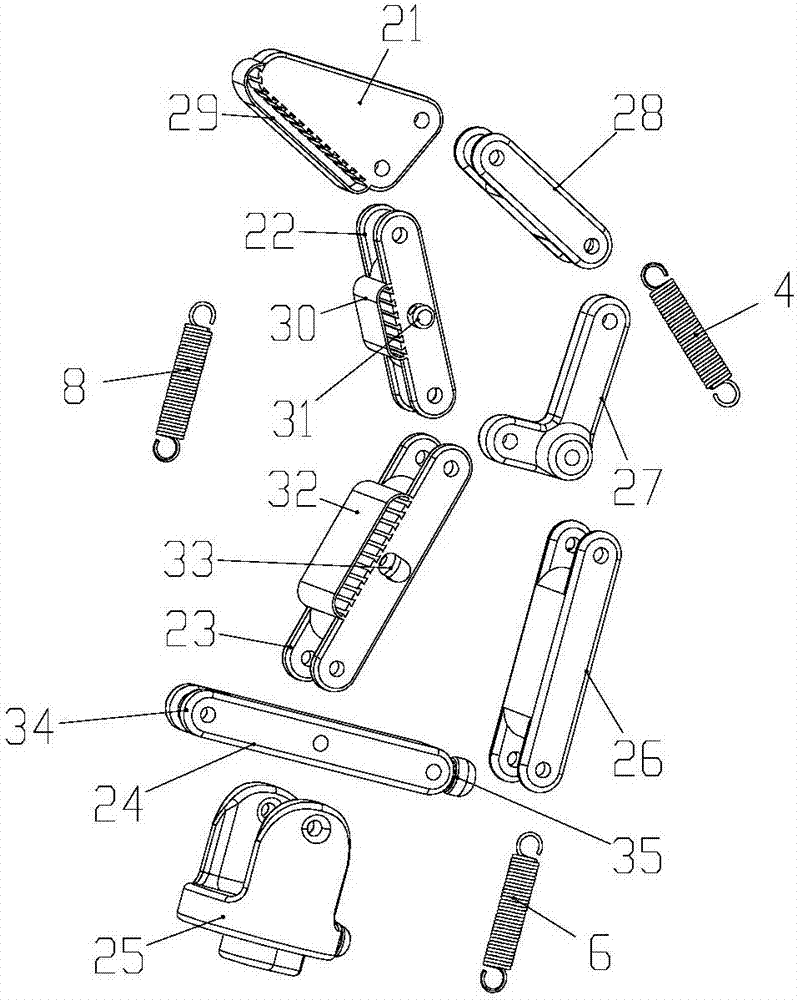
[0029] figure 1 is a structural schematic diagram of the flexible self-adaptive underactuated robotic gripper of the present invention, figure 2 It is a schematic diagram of the structure of the wrist in disassembled state, Figure 4 and Figure 5 It is a schematic diagram of the structure of the skeleton under different viewing angles, Figure 6 is a schematic diagram of the structure of a rotating body. A flexible self-adaptive underactuated robot gripper, including a finger 1 and a wris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More