

Underwater monitoring robot
A robot, cabin technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
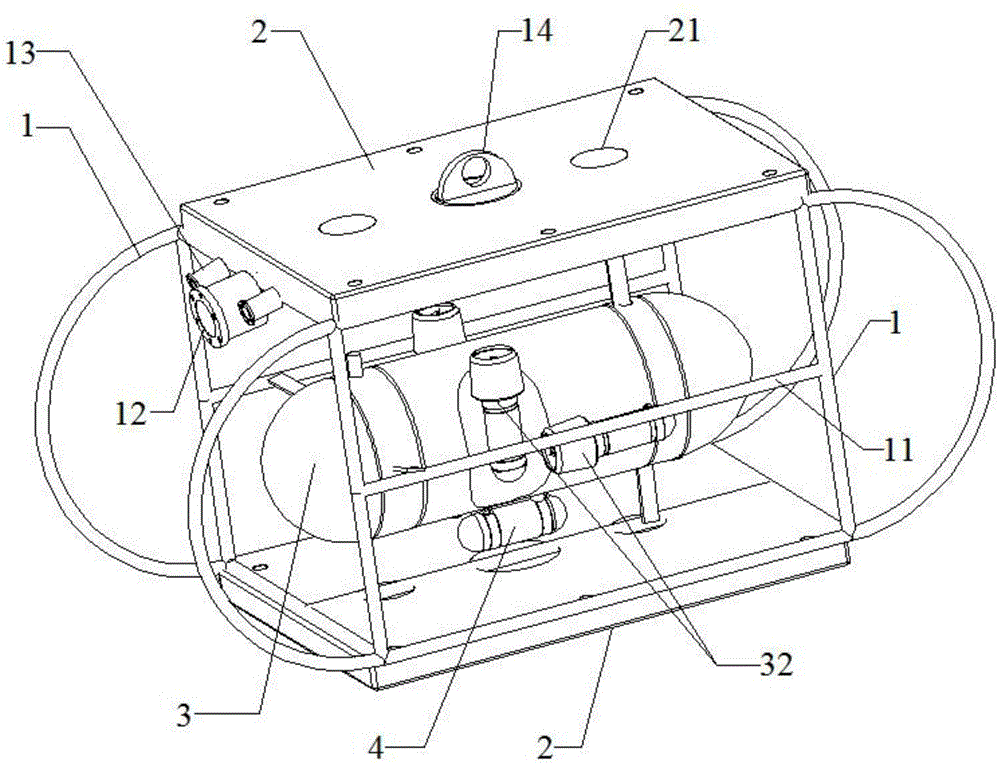
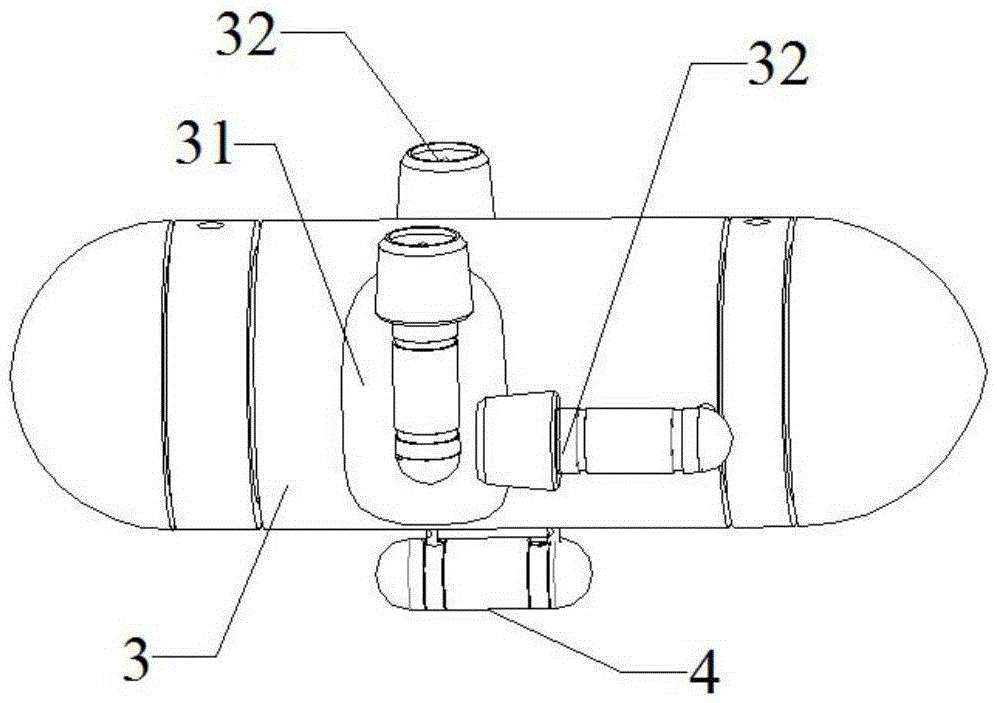
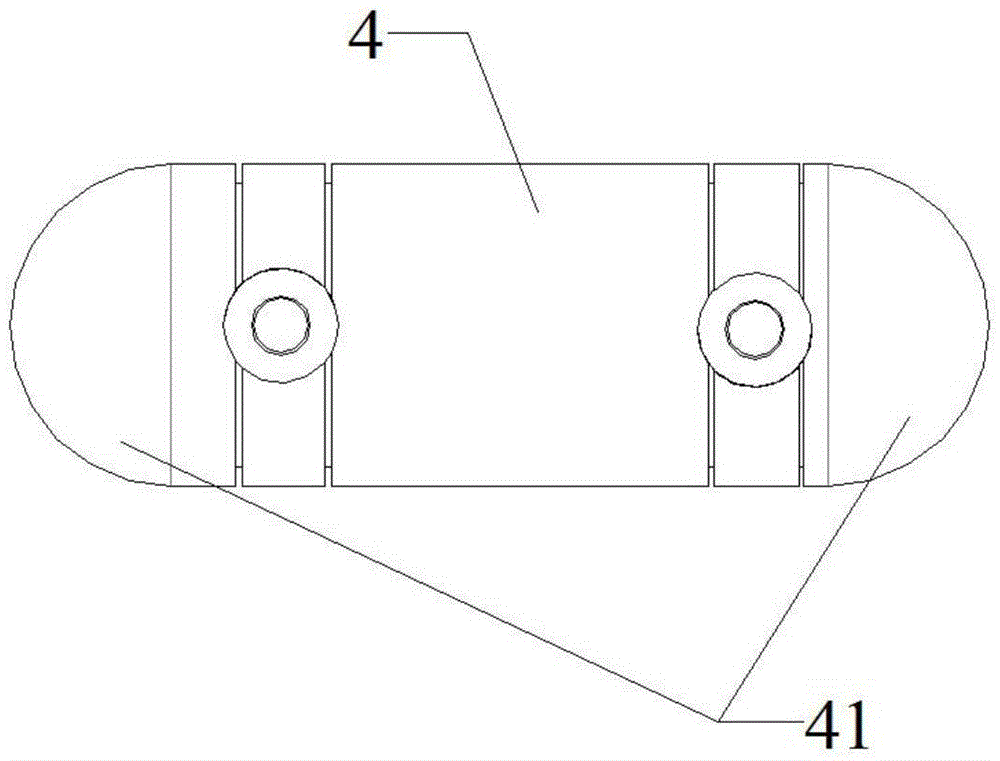
[0020] An underwater monitoring robot, comprising a waist circular frame 1, a suspension body 2, a control cabin 3, and a sensing instrument cabin 4, two support rods 11 are symmetrically arranged in the middle of the front and rear sides of the waist circular frame 1, and the The control cabin 3 is installed between the support rods 11 , the sensing instrument cabin 4 is located below the control cabin 3 , and the suspension body 2 is fixed on the upper and lower ends of the waist-circular frame 1 .
[0021] The upper ends of the left and right sides of the waist circular frame 1 are also provided with cameras 12 and LED spotlights 13. There are four LED spotlights 13, which are divided into two groups on average, and are fixed on the left and right sides of the waist circular frame 1. On the side, there are two cameras 12, which are placed between each group of LED spotlights 13. The waist circular frame 1 can protect the control cabin 3, prevent the control cabin 3 from bein...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More