

Two-dimensional imagination expression method of three-dimensional laser-point cloud data
A point cloud data, three-dimensional laser technology, applied in image data processing, 2D image generation, projection reproduction, etc., can solve problems such as inability to effectively eliminate limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The specific implementation of the present invention includes two aspects, one is the acquisition of three-dimensional laser point cloud data, and the other is generating a grayscale image according to the three-dimensional laser point cloud data.
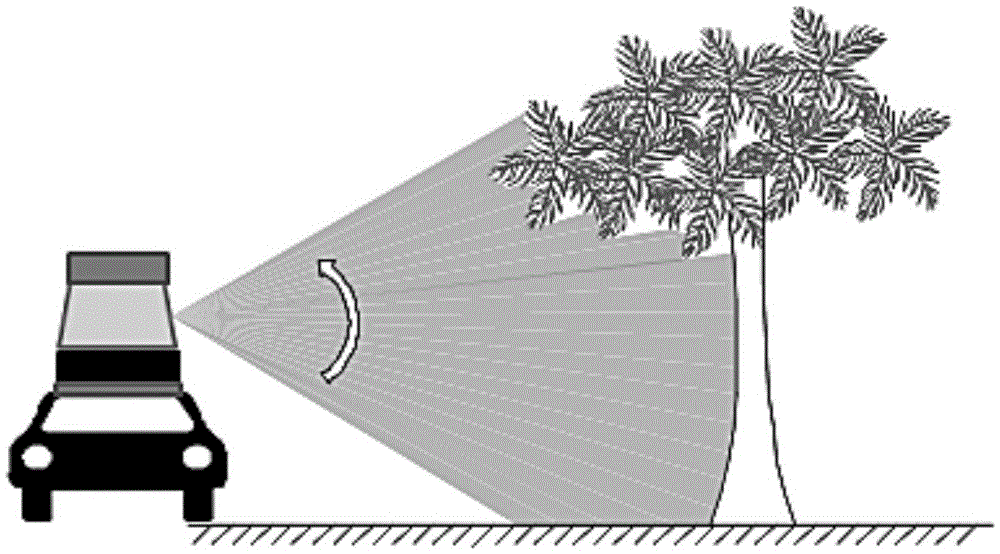
[0052] The three-dimensional laser point cloud data used in the present invention may be collected by a ground mobile robot platform or an aerial mobile robot platform, or may be obtained by any other collection method. The present invention does not have too many requirements for the selection of the site, and both indoor and outdoor environments are acceptable. The scanning method of the scene can be selected as a fixed-point scanning method or a continuous laser scanning method. It is required that the collected 3D laser point cloud data can distinguish the laser data points belonging to each frame of laser line, so that the 3D laser point cloud data can be stored in the form of a two-dimensional array, and the pixels of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More