

Force control traction and swinging multi-degree-of-freedom mechanical arm control device and method
A technology of control devices and manipulators, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of high system maintenance cost, selection of teaching trajectory, time-consuming teaching operation process, and easy accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further elaborated below through specific embodiments in conjunction with the accompanying drawings.
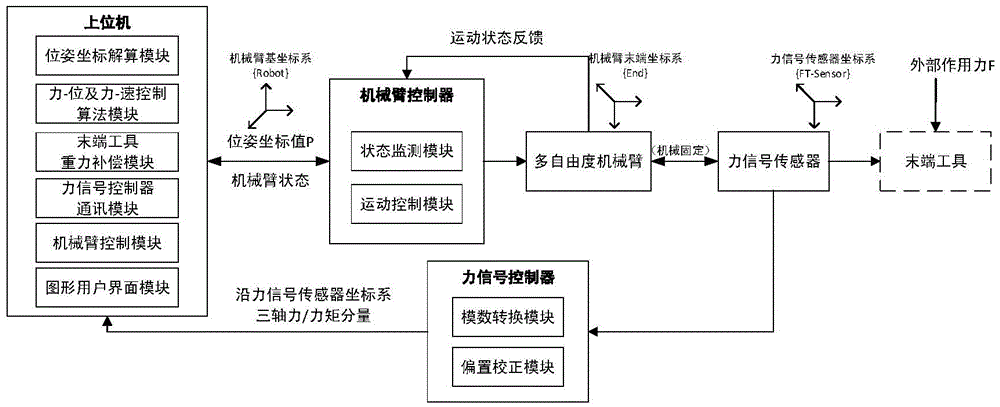
[0055] Such as figure 1 As shown, the multi-degree-of-freedom manipulator control device for force-controlled traction and positioning in this embodiment includes: a host computer, a multi-degree-of-freedom manipulator system and a six-degree-of-freedom force sensor system; wherein the multi-degree-of-freedom manipulator system includes a multi-degree-of-freedom Degree of freedom manipulator and manipulator controller; six degrees of freedom force sensor system includes force signal sensor and force signal controller; upper computer includes force signal controller communication module, end tool gravity compensation module, force-position and force-speed control Algorithm module, pose coordinate calculation module, manipulator control module and graphic user section module; the upper computer is respectively connected with the manipulator ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More