

Wireless-remote-control three-way crawler-type pipe dredging robot
A wireless remote control and robot technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problems of incompetent small pipe dredging work, no remote control device, no visualization device, etc., to increase the working range and reliability. The effect of enhancing safety and reliability and reducing operating costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0032] Any feature disclosed in this specification (including any appended claims, abstract), unless otherwise stated, may be replaced by alternative features that are equivalent or serve a similar purpose. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
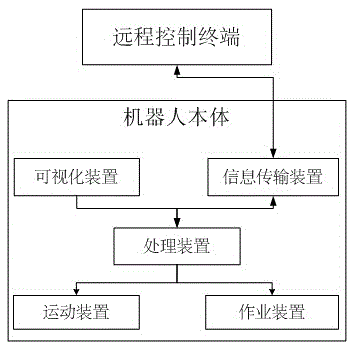
[0033] Embodiment 1 of the present invention provides a three-way crawler-type pipeline dredging robot that can be wirelessly controlled, and the flow chart is as follows figure 1 As shown, the specific steps are as follows:
[0034] Step 1: Start the entire robot system, and test whether the communication between the remote control terminal and the robot is normal. If it is normal, put the pipeline dredging robot into the pipeline and start the robot.
[0035] Ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More