Angle and myoelectricity continuous decoding method for human body lower limb walking joint
A joint angle and decoding method technology, applied in medical science, sensors, diagnostic recording/measurement, etc., can solve problems such as complex model structure, difficult practical application, and inability to measure physiological parameters, so as to achieve accurate prediction angle, accurate implementation, and model Stable and reliable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the technical means, creative features, goals and effects of the present invention easy to understand, the specific implementation of the technical solution of the present invention will be further described below in conjunction with specific diagrams.
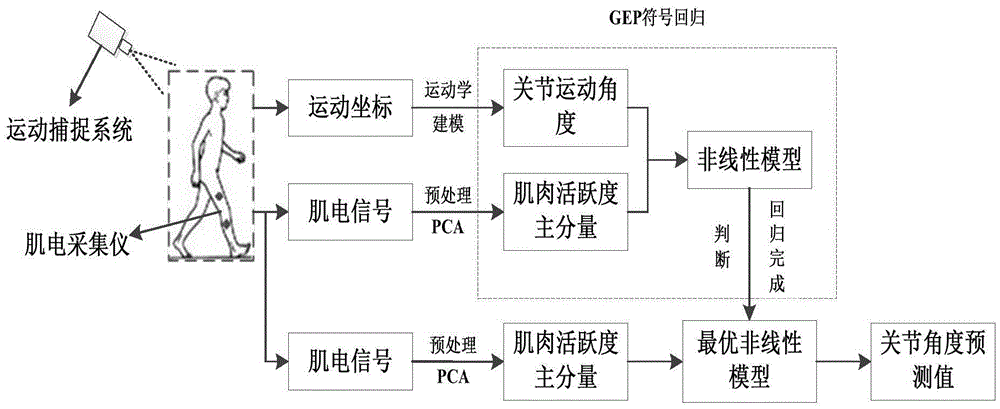
[0048] see Figure 1 to Figure 6 Shown, a kind of human body lower limb walking joint angle myoelectric continuous decoding method of the present invention comprises the following steps:
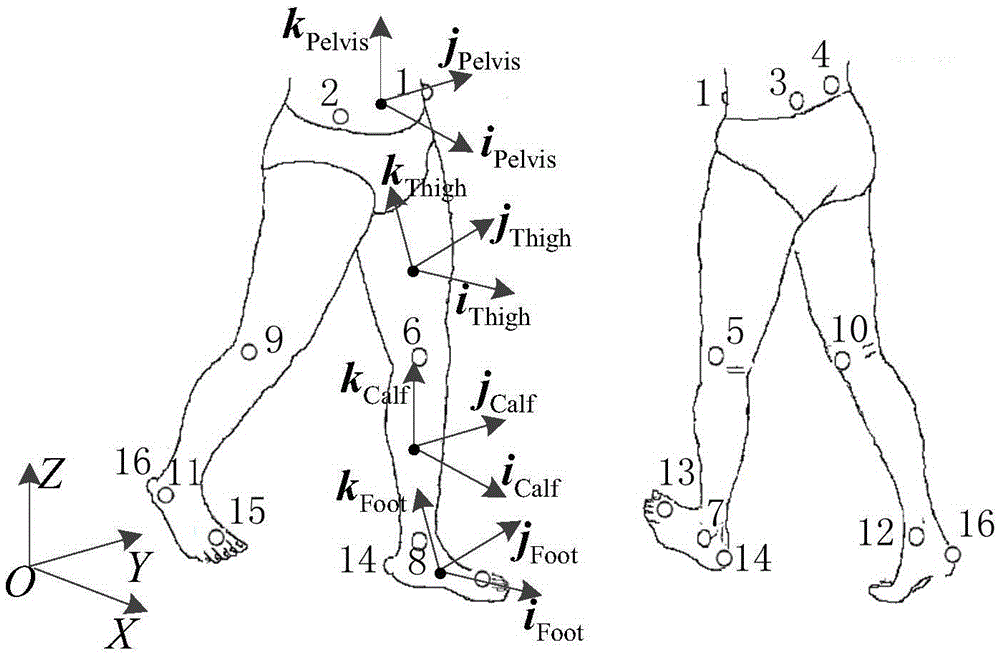
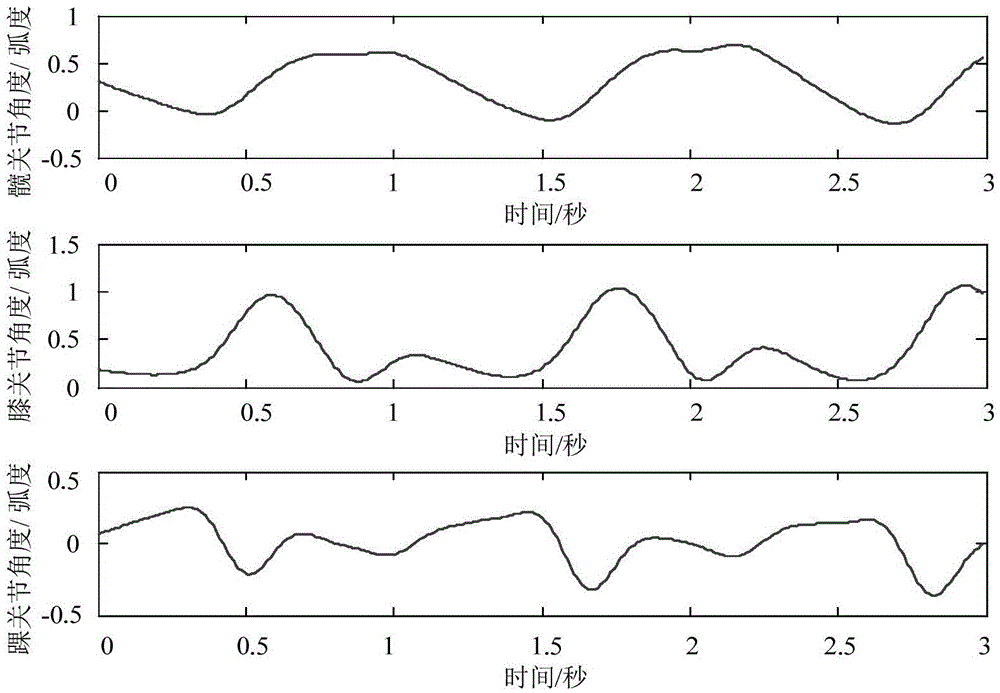
[0049] The infrared three-dimensional motion capture system is used to record the three-dimensional coordinates of the human body movement, and then the movement angles of the hip joints, knee joints and ankle joints of the lower limbs are calculated; a 16-channel myoelectric acquisition instrument is used to collect the myoelectric signals of 8 muscles during the walking process of the human body. They are : Rectus femoris, vastus lateralis, biceps femoris, semitendinosus, soleus, medial gastrocnemius, lateral gastro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More