

Remote state tracking and control method and system for AUV platform
A control system and platform technology, applied in the direction of control/regulation system, non-electric variable control, height or depth control, etc., can solve the problems of high cost, deviation of inertial navigation data, and inability to track the underwater motion state of AUV platform, etc. Achieve the effect of reducing the cost of repeated retraction and increasing the space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
[0015] 1 overall plan
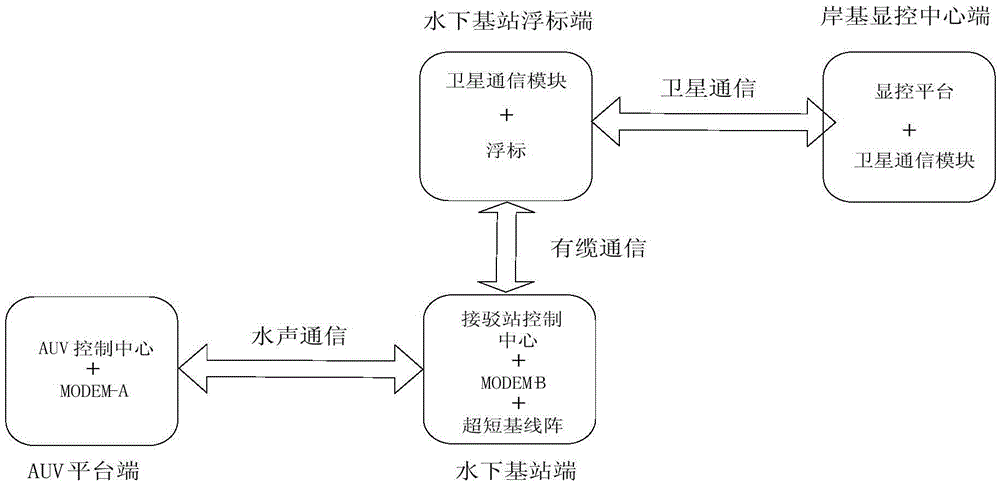
[0016] figure 1 It is a working schematic diagram of the AUV platform remote state tracking and control system of the present invention. The system uses the ultra-short baseline direction finding method, the underwater wireless acoustic communication ranging method and the satellite communication method, and mainly includes a shore-based display and control center terminal, an underwater The working protocol of the buoy terminal of the lower base station, the underwater base station terminal, the AUV platform terminal and the underwater acoustic communication and positioning system.
[0017] This system design has two working modes, one is AUV platform status tracking and control; the other is AUV platform back-to-station charging and data interaction.
[0018] In the AUV platform state tracking and control working mode, its working ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More