Special no-weighing starting torque compensation algorithm for elevator and debugging method
A debugging method and restarting technology, applied in elevators, transportation and packaging, etc., can solve the problems of inconspicuous feeling, difficult to determine the compensation time, and unstable compensation effect, so as to suppress the system overshoot, improve the response speed, and improve the The effect of debugging efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the technical means, creative features, objectives and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
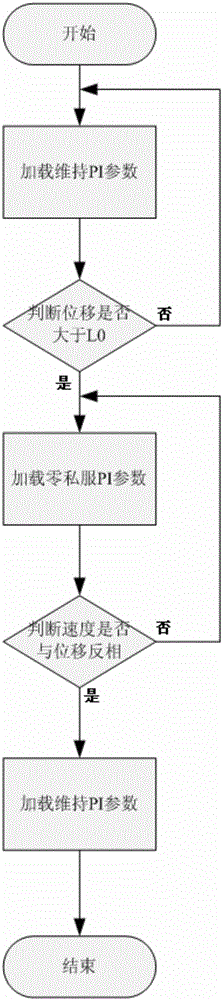
[0024] The invention includes the judgment of the starting torque compensation time, the calculation of the starting torque compensation size and the corresponding debugging method.
[0025] Compensation torque time: According to the characteristics of the brake of the vertical elevator, after the elevator brake release signal is output, the weight of the counterweight and the weight of the car will act on the traction sheave quickly, so the torque must be given quickly at the moment of brake release, otherwise the elevator will The rapid decline compensation algorithm also loses its meaning. In addition, because the brake is a spring mechanical structure, with the increase of the number of uses, the aging of the mechanical structure and the change of temperature, the exact time of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com