

Impact-proof buffer release control method and experiment apparatus for space tether system combination body
A space tether and release control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of unrealistic tension model, tether deformation, etc., achieve the convenience of engineering realization, avoid system impact and Collision, control simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with drawings and embodiments.
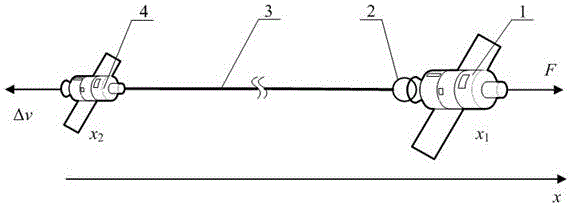
[0029] Such as figure 1 As shown, after the space tether capture system completes the capture, assuming that the target 4 has an initial velocity relative to the mission platform 1, it will cause a large impact on the space tether 3. When there is jet thrust F of the mission platform 1, the system will There is continuous vibration under the elastic action of the tether, which is not conducive to the stability of the assembly. Consider releasing the tether through the tether retractable device to achieve the goal of shock resistance for the assembly.
[0030] The system assumes the following:
[0031] (1) The direction of the propulsion force F of the task platform passes through the line connecting the target object 4 and the center of mass of the task platform 1, the center of mass of the target object 4 and the task platform 1 is on a straight line with the space te...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More