

A track following method based on a neural network and a PID algorithm
A neural network and algorithm technology, applied in attitude control and other directions, to achieve good robustness, fast real-time performance, and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
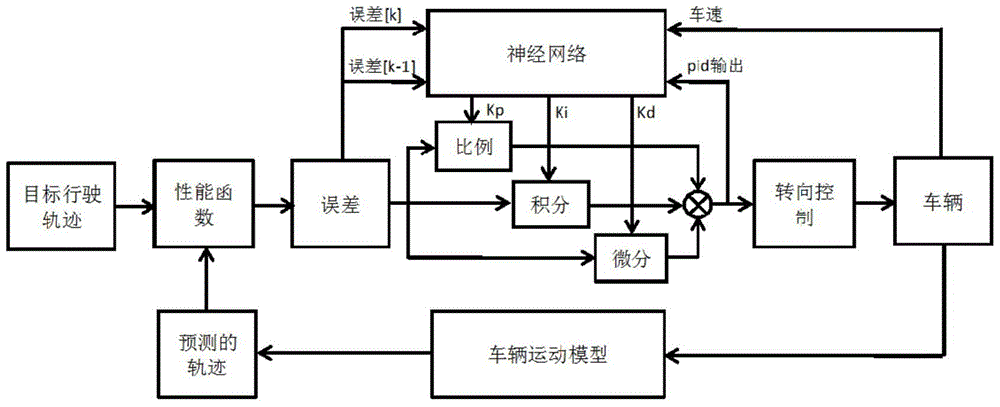
[0013] like figure 1 As shown, the present invention provides a kind of trajectory following method based on neural network and PID algorithm, and it comprises the following steps:
[0014] S1. Obtain the expected driving trajectory parameter value, the driving trajectory parameter value including position coordinate value, heading angle, speed and angular velocity;
[0015] S2, obtaining the current vehicle's driving trajectory parameter value, and predicting the driving trajectory parameter value of the vehicle after the vehicle motion model;
[0016] S3, using the performance function to obtain an error value according to the expected driving trajectory parameter value obtained in step S1 and the predicted driving trajectory parameter value;
[0017] S4, input the error value obtained in step S3 into the PID controller to obtain the steering wheel angle, and control the steering of the vehicle according to the angle;
[0018] S5, repeat steps S2 and S3 to obtain the error...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More