

Wearable hand exoskeleton rehabilitation training robot
A rehabilitation training and exoskeleton technology, applied in the field of rehabilitation robots, can solve problems such as impaired hand motor function, and achieve the effects of simple structure, small size and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the drawings and embodiments.
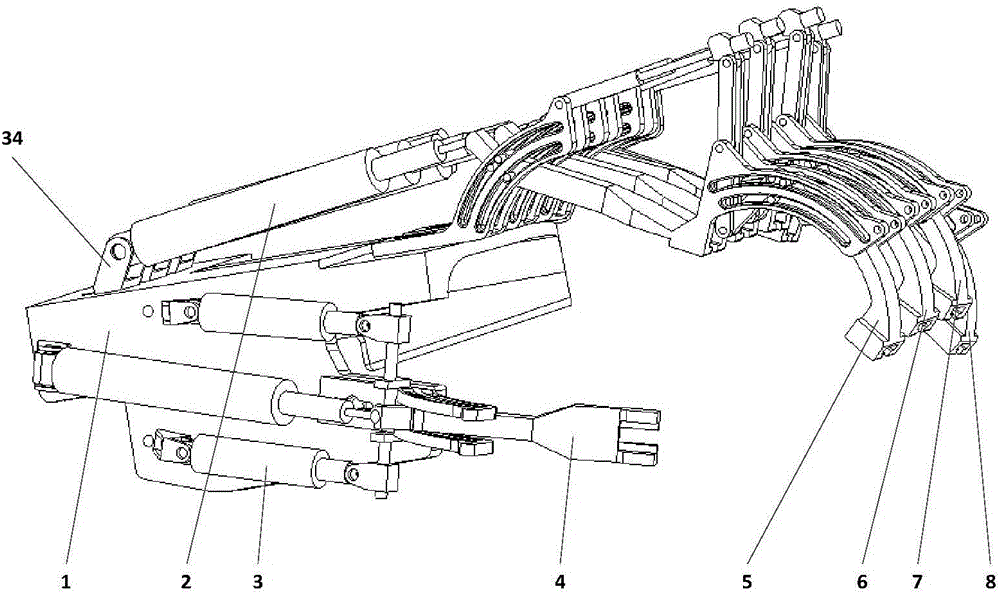
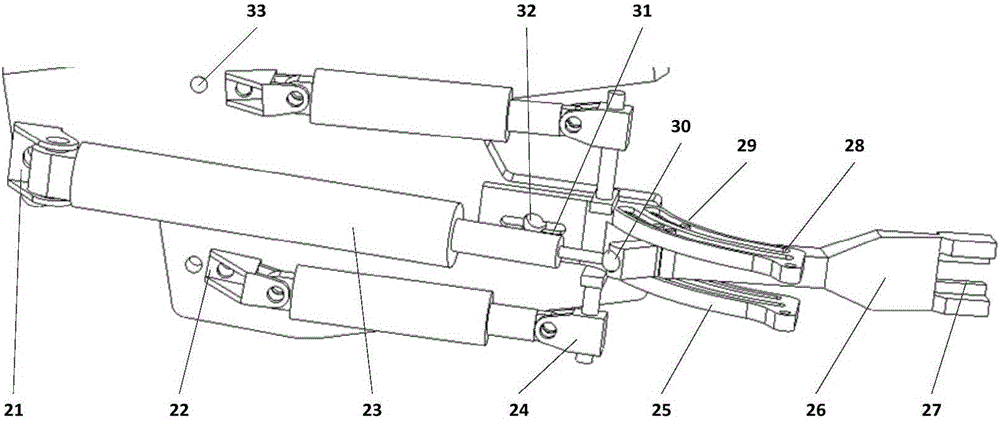
[0031] by figure 1 As shown, this embodiment describes a wearable hand exoskeleton rehabilitation training robot whose structure is as follows figure 1 As shown, it includes a hand fixing device 1, a thumb rehabilitation system and a four-finger rehabilitation system for fixing the back of the hand and wrist. The outer surface of the hand fixing device 1 is used to fix the exoskeleton rehabilitation training robot, and the inner surface is a curved surface for sticking. The structure fits the back of the hand and is fixed to the hand by Velcro. The thumb rehabilitation system includes a thumb 4 mechanism, a power source (middle thumb motor 23, thumb linear motor 3), and a hand fixing device 1 connected to the power source; the four-finger rehabilitation system includes index finger 5, middle finger 6, ring finger 7 and little finger 8 mechanism and a power source (four...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More