

Robot kinematics calibration method based on vision measurement and distance error model
A technology of robot kinematics and distance error, which is applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., and can solve problems such as repetition errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
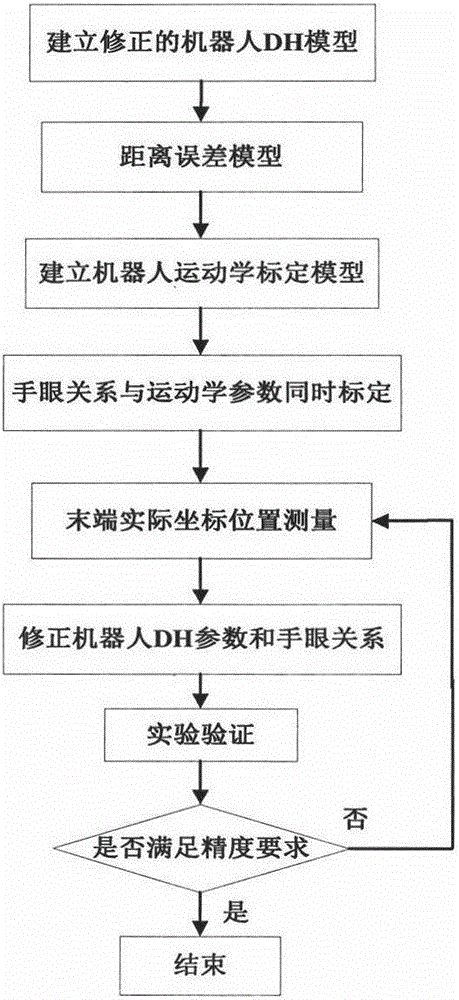
[0057] Such as figure 1 Shown is the flow chart of the robot kinematics calibration method based on visual measurement and distance error model, the implementation of the present invention will be further described below according to the accompanying drawings and specific examples:
[0058] S1, establish the corrected robot D-H model;
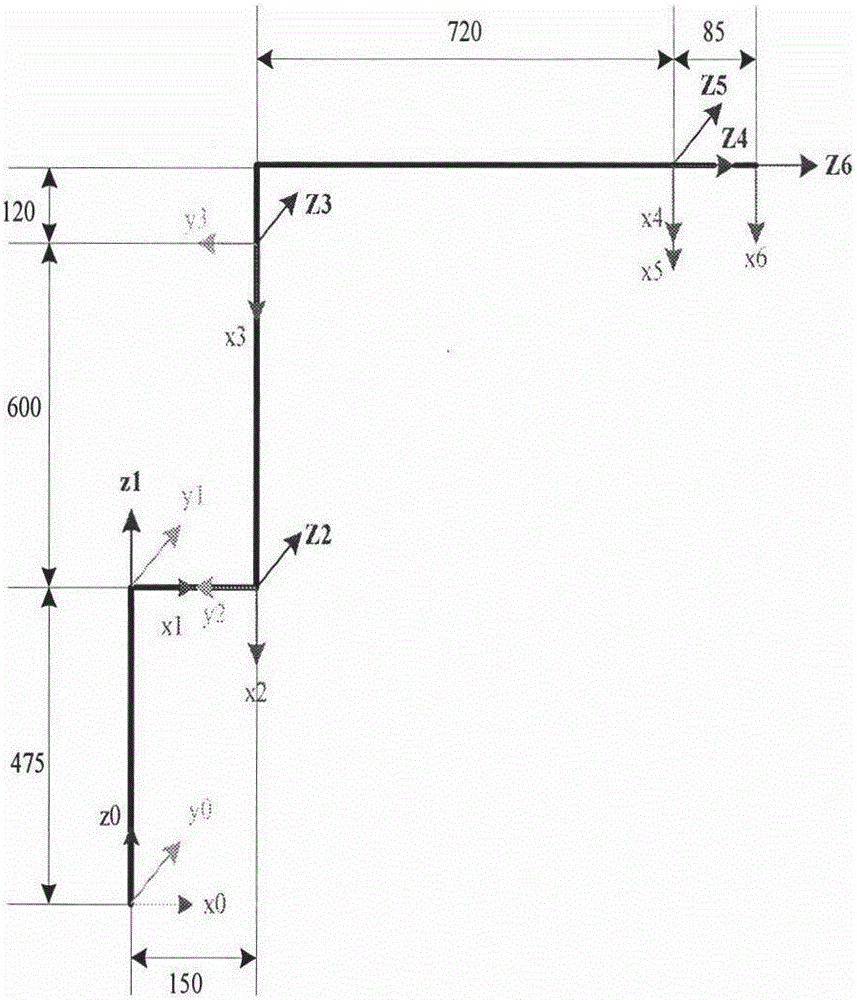
[0059] The D-H model is the most basic robot kinematics model. It is a method to describe how to model the connecting rods and joints of the robot, and is widely applicable to any robot configuration. figure 2 Shown is the D-H kinematics model diagram of the 6-axis robot, which contains 4 geometric parameters: link length a, link rotation angle α, link offset distance d, and joint angle θ. The homogeneous transformation relationship matrix of the adjacent joint coordinate system of the traditional D-H model connecting rod i-1 and connecting rod i is shown in the following formula (1):
[0060]
[0061] However, when the rotation axes of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More