Rope Drive Decoupling Mechanism Based on Gear Train and Its Decoupling Method
A technology of rope drive and wheel train, which is applied in the field of manipulator system, can solve the problems that the control accuracy and dynamic response characteristics of the manipulator are difficult to guarantee, the complexity of the control algorithm increases, and the friction between the rope and the lasso is large, so as to simplify the motion control algorithm , Simple structure, avoiding the effect of large friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The accompanying drawings disclose non-restrictive structural schematic diagrams of the present invention involved and preferred implementations, and the technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
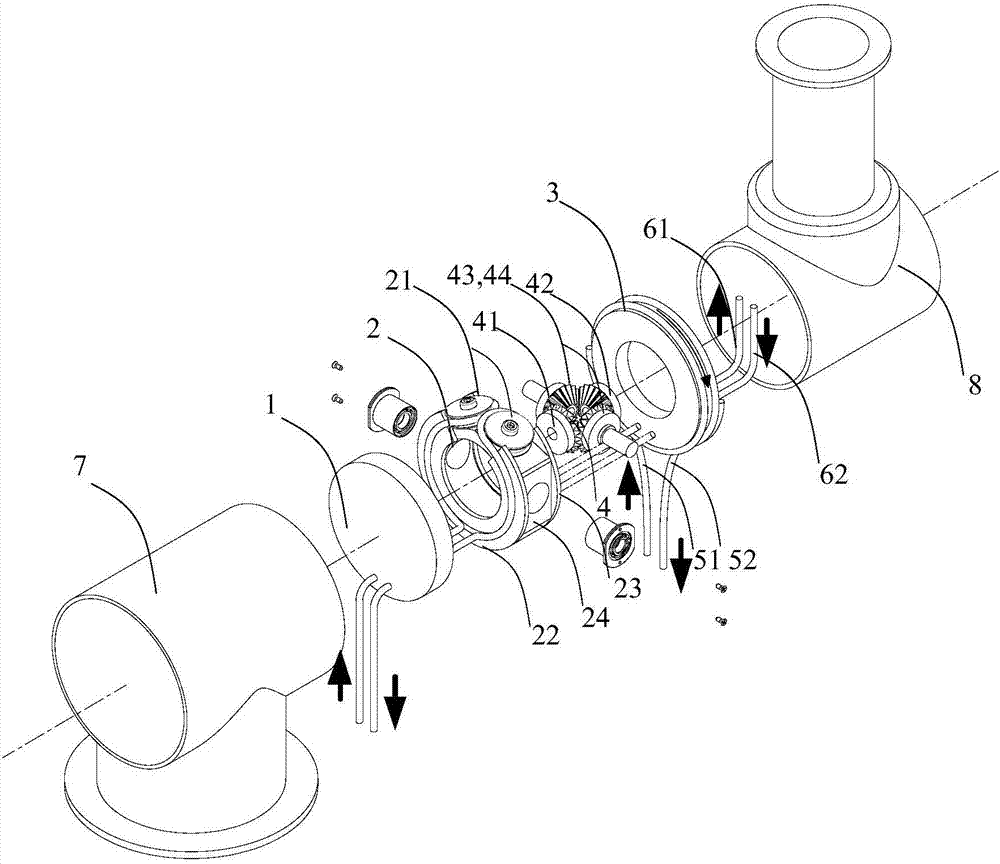
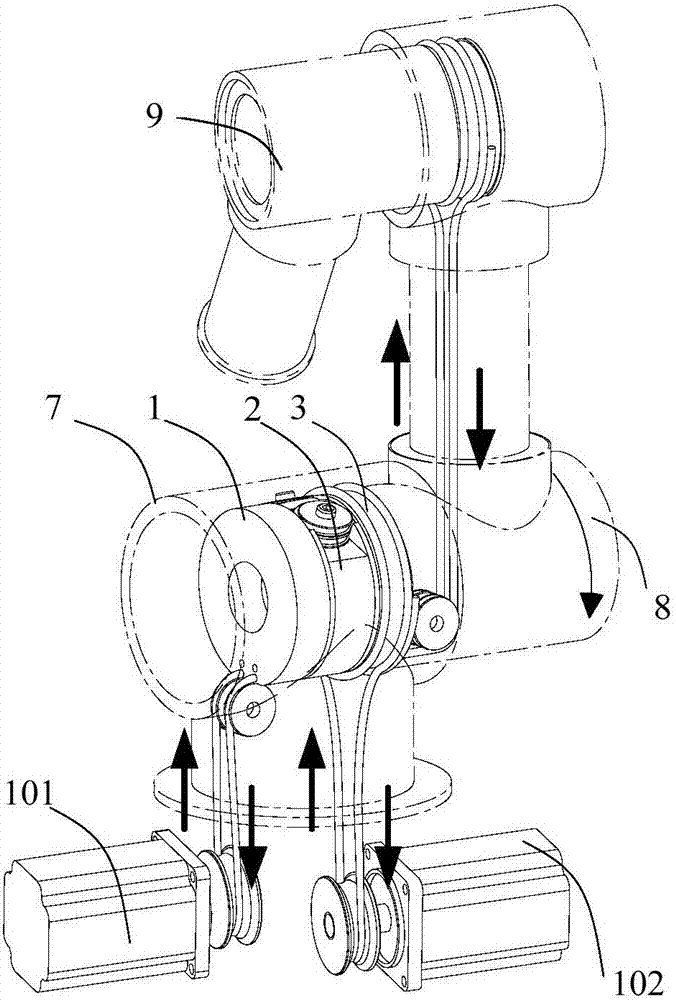
[0033] see figure 1 and image 3 As shown, the present invention discloses a passive decoupling mechanism for the driving rope movement of a rope-driven series mechanical arm, which sequentially includes a joint base 7, a fixed wheel 1, a follower wheel 2, a planetary gear train 4, a driving wheel 3, The current joint connecting rod 8; wherein the fixed wheel 1 is fixedly connected with the joint base 7 and cannot rotate; the driving wheel 3 is fixedly connected with the current joint connecting rod 8, and rotates following the current joint connecting rod 8; the fixed gear 41 is connected to the fixed wheel 1 through a flat key Connected, the driving gear 42 is connected with the driving whee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More