

Unmanned underwater vehicle IVFH (intelligent vector field histogram) collision avoidance method
An underwater vehicle, collision avoidance technology, applied in the direction of instruments, two-dimensional position/channel control, non-electric variable control, etc., can solve difficult to meet real-time requirements, unmanned underwater vehicle collision, large storage space and runtime issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
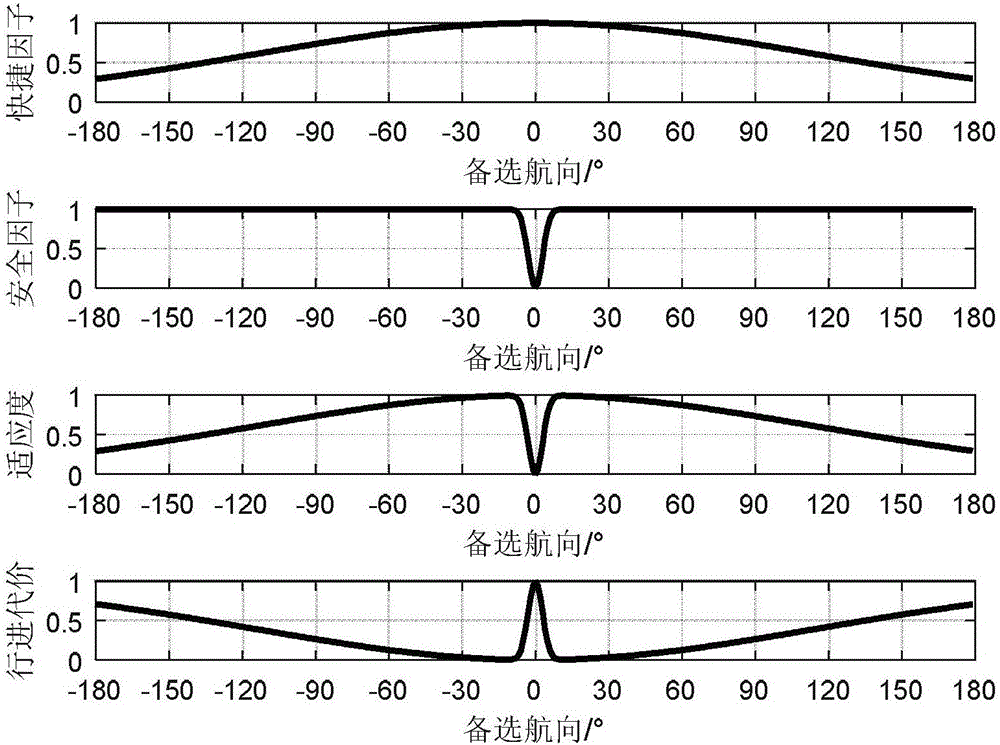
[0057] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS One, IVFH collision avoidance method for unmanned underwater vehicle, the technical scheme adopted by the present invention to realize its purpose is: by comparing the travel costs of each candidate course of unmanned underwater vehicle, select the best course as the next The heading command at any time, in which the sum of the travel cost and the fitness is 1, and the fitness is expressed as the product of the safety factor and the shortcut factor to take into account both safety and rapidity; comprehensively consider obstacle distance, target point distance, free grid Factors such as the percentage and the known field of view percentage determine the speed command of the UUV and the range of collision avoidance actions, so as to ensure that the UUV has enough time to fully perceive the environmental information and have sufficient time before colliding with obstacles Make evasive decisions and respond to them.
[0058]...
specific Embodiment
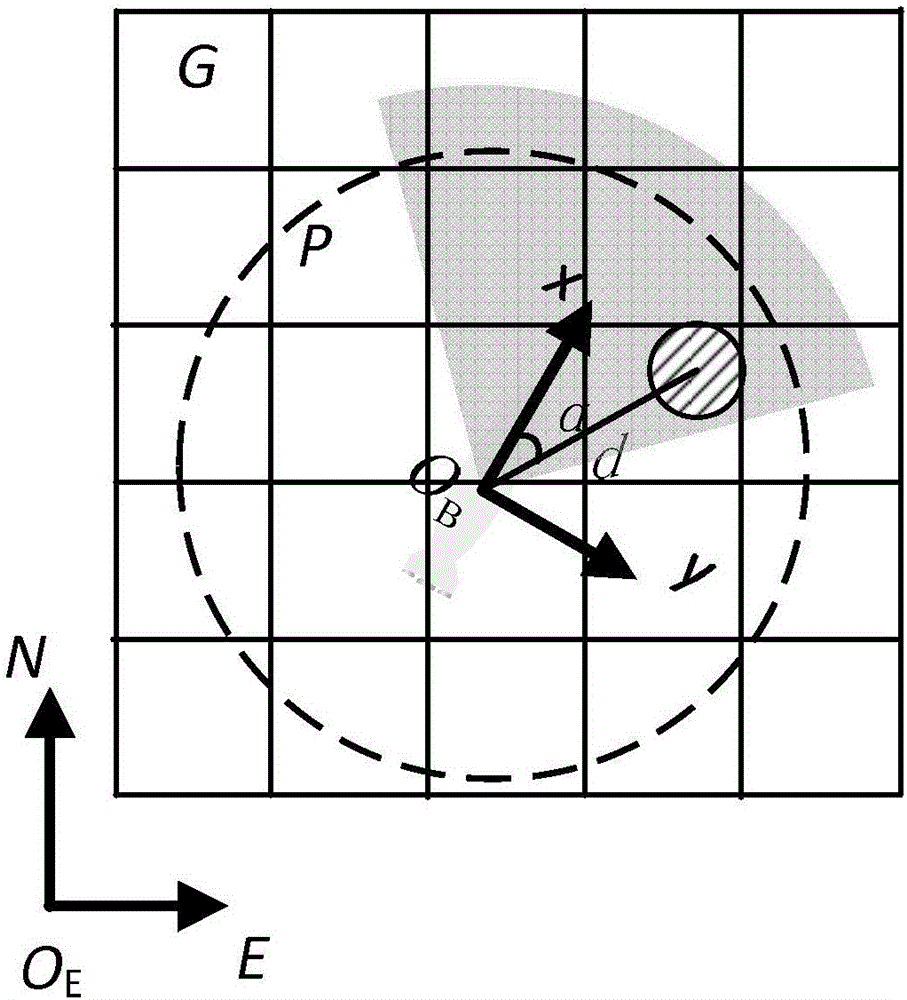
[0107] figure 1 , establish the earth coordinate system O E NE, hull coordinate system O B xy, grid map G and polar coordinate system P. According to the obstacle information detected by the sonar, the obstacle confidence (CertaintyValue, CV) of each grid is counted, and each grid is marked as a free grid or an occupied grid.
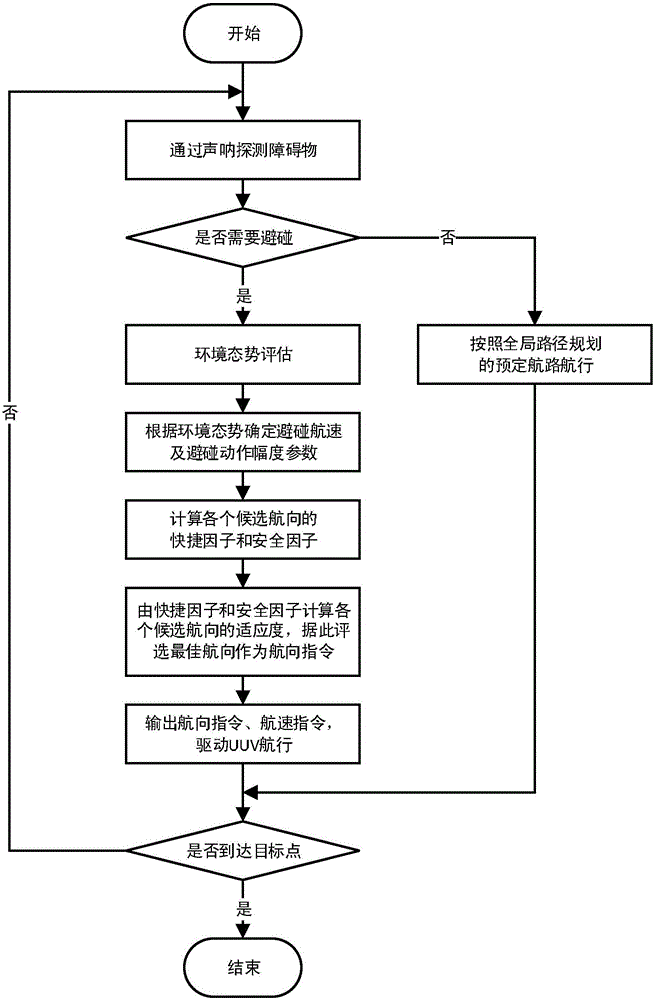
[0108] figure 2 , during each step of navigation of the unmanned underwater vehicle, according to the distribution of obstacles, the following steps are used to determine the heading command and speed command at the next moment:
[0109] Step 1: Evaluate the environmental situation from the aspects of obstacle distance, target point distance, free grid percentage, known viewshed percentage, etc.
[0110] (1), calculate the distance from the unmanned underwater vehicle to the nearest obstacle, and normalize:
[0111] d ‾ o b j min ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More