

Machine vision-based ship hull six-degree-of-freedom measurement method
A technology of machine vision and measurement methods, applied in measurement devices, instruments, image data processing, etc., can solve the problems of seldom application, insufficient precision, and high price
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048]The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0049] The problem solved by the technology of the present invention is: in order to overcome the shortcomings of the existing six-degree-of-freedom measuring equipment of the ship hull, which are huge, complicated to install, and have low precision, the present invention provides a non-contact real-time six-degree-of-freedom measuring method for the ship hull, which can not only accurately measure The value of the six degrees of freedom of the hull, and because of its non-contact characteristics, the measurement method is more convenient and effective.
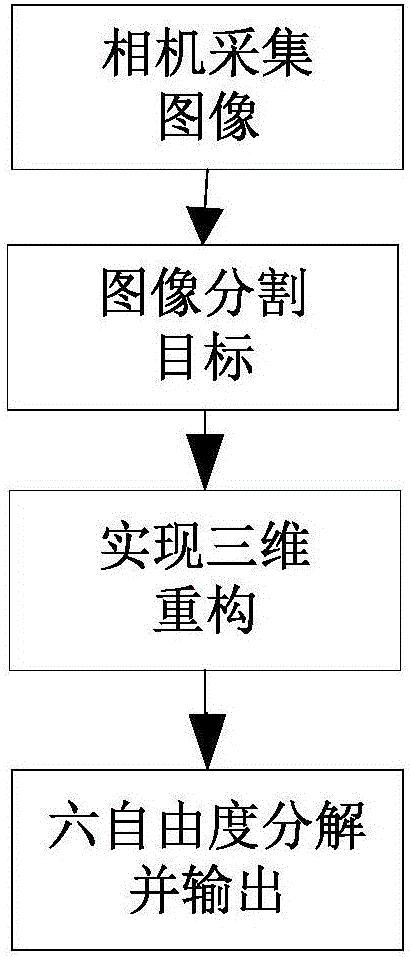
[0050] The technical solution adopted by the present invention to solve its technical problems is: figure 1 The shown method flowchart concisely introduces the whole measurement process.
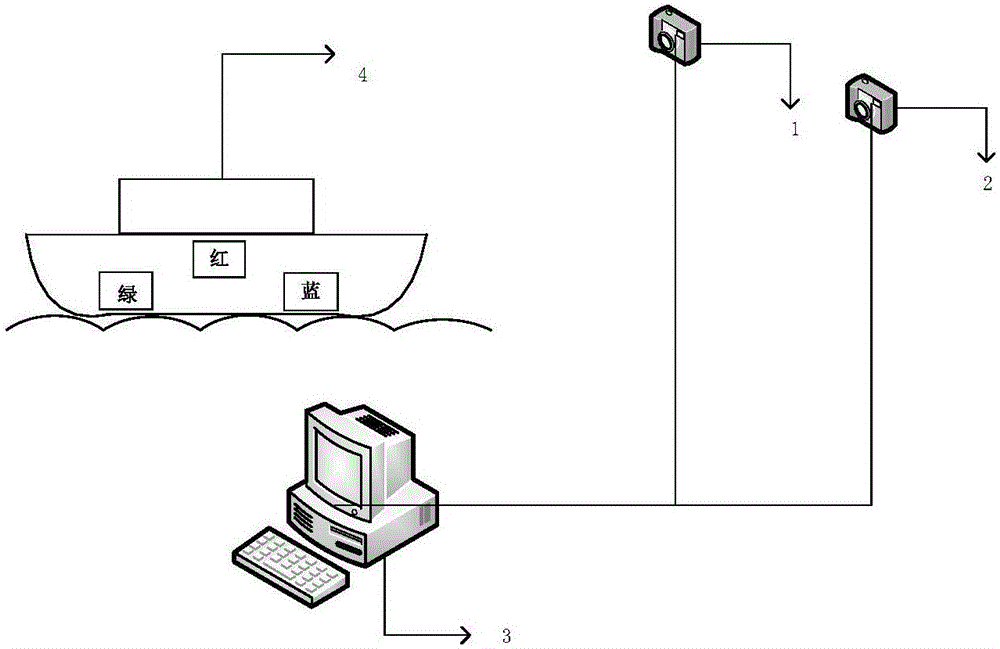
[0051] Step 1: Two cameras placed in different positions are connected to the image acquisition card in the computer thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More