

Direction of Arrival Estimation Method Based on Nested Subarray Array
A direction-of-arrival estimation and formula technology, applied in the field of signal processing, can solve the problems of the degree of freedom and the reduction of the array aperture, the limited transmission power, etc., and achieve the effects of easy change of positions, low cost, and convenient mass production
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
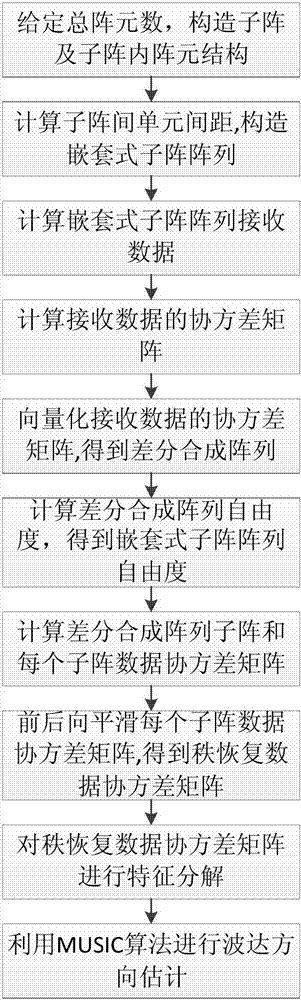
[0046] In Embodiment 1, both the sub-array structure and the array element structure within the sub-array adopt the nested sub-array array DOA estimation of the uniform linear array ULA structure.
[0047] Step 1. Given the total number of array elements S, construct the subarray structure and the array element structure within the subarray.
[0048] The non-uniform array structure in the prior art includes three: one is the minimum redundant array MRA, and its structure is to obtain the array structure of the minimum redundant sequence and the minimum redundant array MRA according to the total array element number S; the second is the embedding The nested array NA is constructed by obtaining the nesting series of the array according to the total number of array elements S, and then determining the number of array elements on each level according to the nesting series, thereby obtaining the array structure of the nested array NA; The third is the coprime array CA, whose struct...
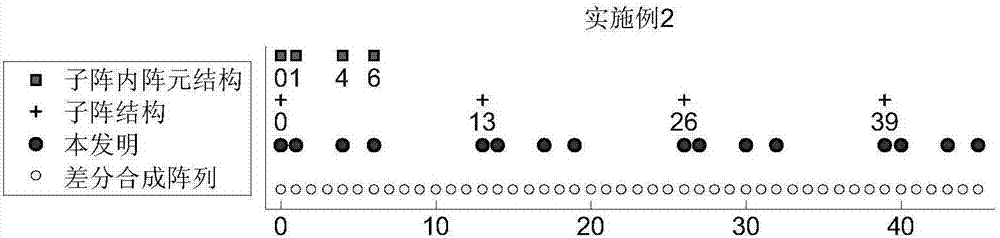
Embodiment 2
[0112] In Embodiment 2, the sub-array structure adopts a uniform linear array ULA structure, and the sub-array element structure adopts a minimum redundant array MRA structure for nested sub-array DOA estimation.
[0113] The difference between this embodiment 2 and embodiment 1 is that the structure of the sub-array and the structure of the array elements in the sub-array are different in step 1, and the other steps are the same as in embodiment 1. The steps of constructing the structure of the sub-array and the structure of the array elements in the sub-array are as follows:
[0114] (1a) Given the total number of array elements S, factorize S to obtain the number of array elements in the sub-array M and the number of sub-arrays N:
[0115] S=M·N,
[0116] Among them, the values of M and N are the closest, and M≥2, N≥2;
[0117] (1b) According to the number M of array elements in the sub-array, the structure of the array elements in the sub-array is designed to be the sam...
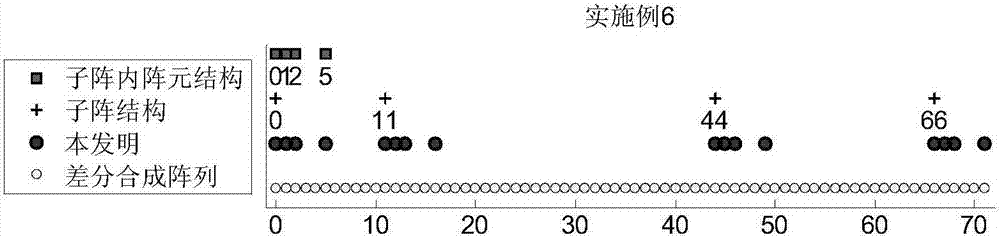
Embodiment 3
[0129] In Embodiment 3, the sub-array structure adopts the ULA structure of the uniform linear array, and the array element structure in the sub-array adopts the nested linear array NA structure to estimate the direction of arrival of the nested sub-array array.
[0130] The difference between this embodiment 3 and embodiment 1 is that the structure of the sub-array and the structure of the array elements in the sub-array are different in step 1, and the other steps are the same as in embodiment 1. The steps of constructing the sub-array structure and the structure of the array elements in the sub-array are as follows:
[0131] 1-a) Given the total number of array elements S, factorize S to obtain the number of array elements M in the sub-array and the number of sub-arrays N:
[0132] S=M·N,
[0133] Among them, the values of M and N are the closest, and M≥2, N≥2;
[0134] 1-b) According to the number M of array elements in the sub-array, the structure of the array elements...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More