

Bionic body mechanism capable of realizing multi-directional bending
A body and bending technology, which is applied in the field of bionic robots, can solve the problems such as the inability to achieve flexible and dynamic bending, and achieve the effects of increasing the motion stability of the mechanism, light weight and large bending amplitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Below in conjunction with accompanying drawing and preferred embodiment the present invention is described in further detail:
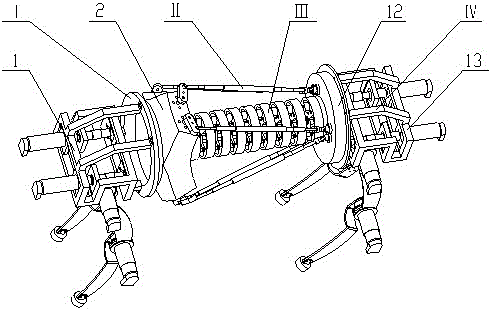
[0025] Such as figure 1 As shown, a bionic body mechanism that can bend in multiple directions includes a front body component I, a drive component II, a bionic spine component III and a rear body component IV; the front body component I and the rear body component IV are frame structures; the drive Component II is six motors respectively driving six fixed-length connecting rods, distributed around the circumference of bionic spine component III, and fixedly connected with front body component I and rear body component IV through screws respectively; the two ends of bionic spine component III are respectively connected by screws It is fixedly connected with the front body component I and the rear body component IV.
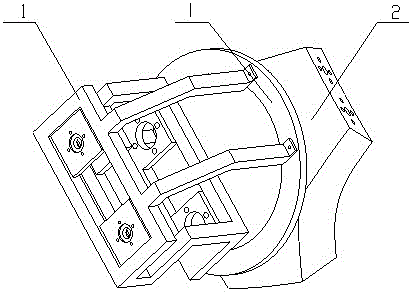
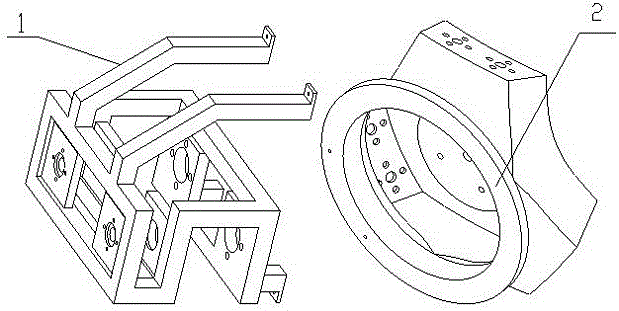
[0026] Such as Figure 2 to Figure 5 As shown, the front body assembly I includes a front body bracket 1 and a front body brack...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More