

Novel hexapod bionic robot
A bionic robot, a new type of technology, applied in the field of mobile robots, can solve the problems of decreased ability to overcome obstacles, low bearing capacity, large torso width, etc., and achieve the effect of enhancing the load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
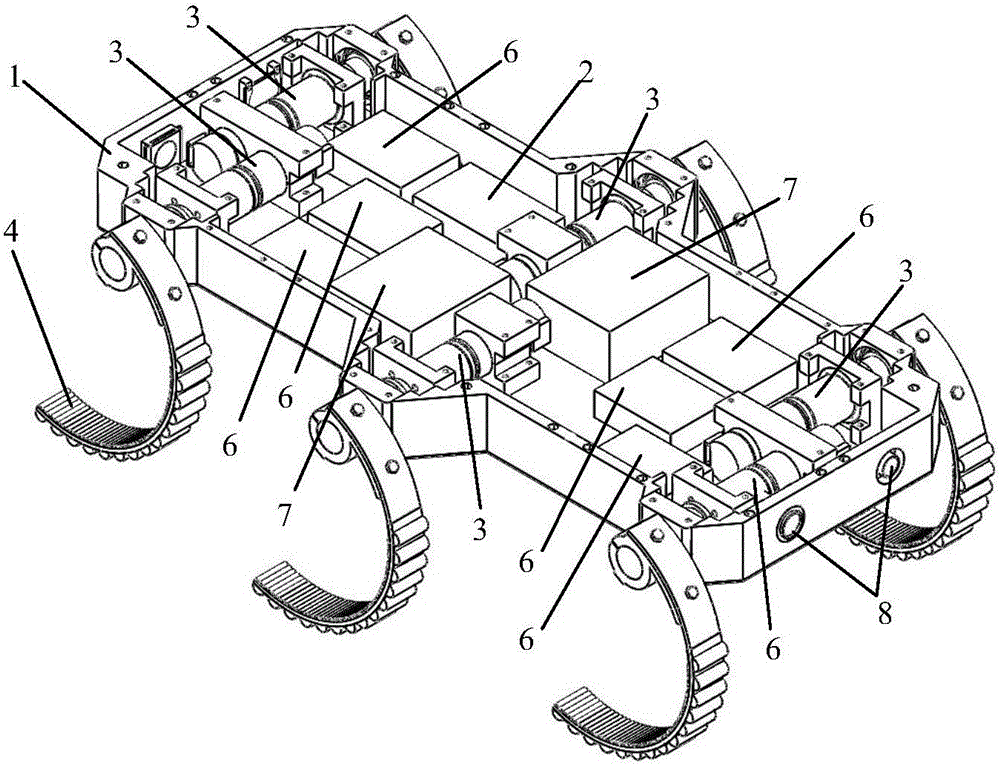
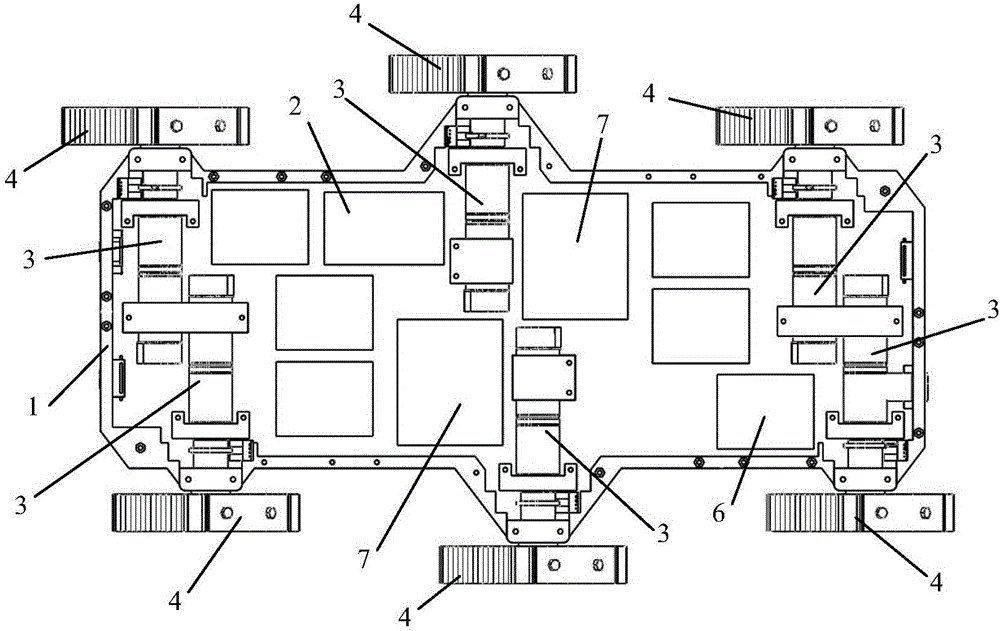
[0024] Such as figure 1 as shown, figure 1 It is a schematic diagram of the three-dimensional structure of a specific embodiment of a novel hexapod robot provided by the present invention; figure 2 for figure 1 Top view of the embodiment shown.
[0025] In a specific embodiment of a novel hexapod robot provided by the present invention, it includes a body frame 1, a controller 2 installed in the body frame 1 and a power supply, and also includes six groups of walking devices; It includes a transmission device 3 and a walking device 4, the walking device 4 is fixedly connected to the power output end of the transmission device 3, and the walking device 4 is driven by the transmission device 3 to perform rotationa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More